PTSL (Pendaftaran Tanah Sistematis Lengkap) merupakan suatu kebijakan mengenai pelaksanaan pendaftaran tanah sistematis yang meliputi semua bidang tanah di seluruh desa maupun kelurahan yang ada di wilayah Republik Indonesia. Kebijakan yang merupakan Program Strategis Nasional (PSN) ini bertujuan untuk memberikan jaminan kepastian dan perlindungan hukum hak atas tanah serta jaminan kepastian letak dan batas bidang tanah dengan membangun data bidang tanah baru sekaligus meningkatkan serta menjaga kualitas data bidang tanah terdaftar yang sudah ada agar seluruh bidang-bidang tanah terdaftar lengkap dan akurat. Namun kegiatan PTSL ini tidak lepas dari permasalahan, sehingga pemerintah, dalam hal ini BPN terus melakukan evaluasi – yang mana hasilnya tertuang pada kebijakan mengenai Petunjuk Teknis PTSL yang dikeluarkan pada tanggal 3 Maret 2023.
Dalam kebijakan tersebut dijelaskan bahwa ketidak-tersediaan peta dasar pendaftaran yang komprehensif serta tidak dilengkapi peta foto udara maupun Citra Satelit Resolusi Tinggi (CSRT) yang bergeoreferensi menjadi sebab timbulnya beberapa masalah diantaranya hasil pengukuran lapangan yang masih belum merata, masih banyaknya tumpang tindih (overlap) data hasil ukur dengan data yang sudah terdaftar, tidak sesuainya bidang tanah terdaftar terpetakan dengan kondisi sebenarnya di lapangan, serta hambatan-hambatan lainnya. Oleh sebab itulah pembuatan peta foto menggunakan Pesawat Udara Nir Awak (PUNA) menjadi salah satu tahapan pelaksanaan kegiatan pengumpulan data fisik yang harus dilakukan pada kegiatan PTSL tahun 2023
Sebagai perusahaan jasa survey pemetaan foto udara menggunakan Pesawat Udara Nir Awak (PUNA), PT Zona Spasial ikut serta dalam mensukseskan Program Strategis Nasional(PSN) ini. Dengan pengalaman dan keahlian yang dimiliki, PT Zona Spasial melakukan pemrotetan udara dengan PUNA untuk mendapatkan peta foto yang akan digunakan sebagai dasar pengukuran pada PTSL 2023. Peta foto yang didapatkan dari kegiatan ini lebih dari yang diharapkan yaitu dengan ketelitian 19-20 cm serta GSD 4 -10 cm.
Penanganan Raw Data (data mentah) yang didapatkan dari Terrestrial Laser Scan merupakan hal yang krusial. Penanganan data yang baik akan mempermudah proses selanjutnya. Raw Data dari jalan tol akses Tanjung Priok ini melibatkan data yang sangat besar, sehingga memerlukan strategi tertentu sehingga proses registrasi dapat dilakukan dengan lebih baik. Strategi registrasi yang kami ambil antara lain sebagai berikut:
1. Jumlah Data Scan yang Banyak
Banyaknya data mentah akan menyulitkan saat registrasi jika dilakukan secara bersamaan. Salah satu cara mengatasi data yang besar adalah clustering. Pengelompokkan data bisa dilakukan berdasarkan hari pengambilan data atau dengan mengelompokkan berdasarkan jenis obyek atau pengelompokan yang lain.
2. Penyatuan Ruas Atas dan Bawah
Penyatuan ini terjadi karena scan dilakukan di jalur atas dan bawah tol secara bersamaan. Untuk menggabungkan hasil data mentah ini perlu digunakan referensi yang sama. Kami menggunakan pick point terhadap satu obyek yang tercapture scan dari atas jalan tol maupun dari bawah jalan tol.
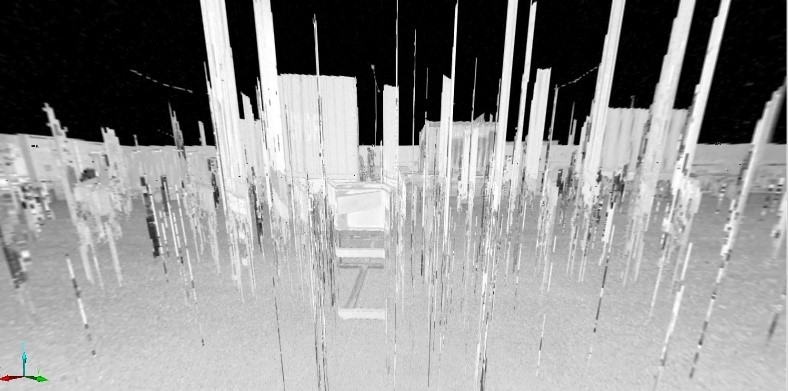
3. Penghalang obyek (Object Barrier)
Pengambilan data dilakukan saat jalan tol tetap beroperasi. Hal ini mengakibatkan adanya halangan terhadap obyek yang discan. Lalu lintas kendaraan mengakibatkan beberapa obyek terhalang, karena pada saat perekaman pointcloud kendaraan melintas. Halangan ini mengakibatkan target dan sphere tidak terlihat atau terhalang. Proses yang dilakukan adalah mengambil point registrasi dari obyek yang sama terlihat dari 2 posisi berdiri alat.
4. Kapasitas Data yang besar
Dengan resolusi scan 1/2 menyebabkan kapasitas data besar dan berat saat processing. Langkah yang diambil dalam mengatasi hal tersebut yaitu dengan membagi area per segmen. Untuk setiap segmen terdiri dari 130-150 data scan. Dimana setiap segmen sudah diregistrasi untuk setiap ruas A-B dan atas-bawah.
5. Hasil Registrasi Tidak Match
Setelah registrasi berhasil dilakukan tetapi memiliki error yang tinggi akan menyebabkan data scan tidak match. Hal tersebut dapat diatasi dengan melakukan pengelompokkan/clustering untuk data yang bermasalah. Data dapat diperbaiki secara efisien dengan membagi menjadi ruas-ruas.
Registrasi point cloud merupakan tahap setelah melakukan proses 3D scanning. Pengolahan data hasil laser scan dijadikan satu kesatuan menjadi satu sistem yang utuh. Adapun sistem koordinat yang dilakukan pada kasus Akses Tanjung Priok (ATP) menggunakan koordinat gobal. Dari beberapa metode registrasi yang ada, dalam kasus ini menggunakan metode target-based.
Prosedur Pengerjaan Registrasi
Adapun prosedur pengerjaan registrasi yang dilakukan pada hasil laser scan Akses Tanjung Priok sebagai berikut:
Impor Data Scan
Data hasil laser scan diimport ke dalam software registrasi untuk dilakukan proses pengolahan data lebih lanjut. Format file berupa .fls.
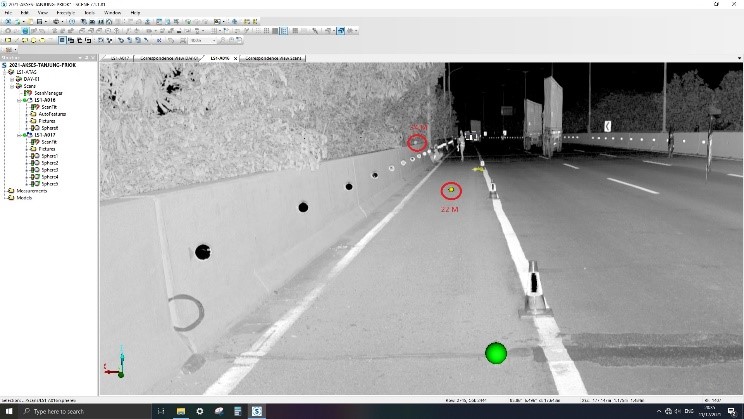
Pick Target
Sphere dan checkerboard sebagai target di-pick. Hal tersebut berfungsi sebagai stitch antar data agar setiap data saling terhubung.
Gambar 1. Pick checkerboard
Gambar 2. Pick Plane object
Gambar 3. Pick Sphere Target
Control Point
Memasukkan control point sebagai sistem koordinat global. Control point juga berlaku sebagai reference yang mana orientasi dan rotasi dari hasil registrasi mengikuti sudut dan koordinat dari control point ini.
Place Scan
Place scan merupakan tahap registrasi untuk menyatukan data-data hasil laser scan dengan parameter yang sudah disediakan di Faro Scene (software registrasi kami).
Check Correspondence
Pada tahap ini, pengecekan dilakukan untuk memastikan bahwa setiap data scan sudah terhubung. Serta memastikan bahwa koordinat dan orientasi data sudah mendekati sama.
Apply Picture dan Ekspor
Tahap terakhir apabila registrasi sudah baik yaitu melakukan coloring. Setelah pewarnaan data, selanjutnya data dieskpor ke format E57 untuk dilakukan modelling.
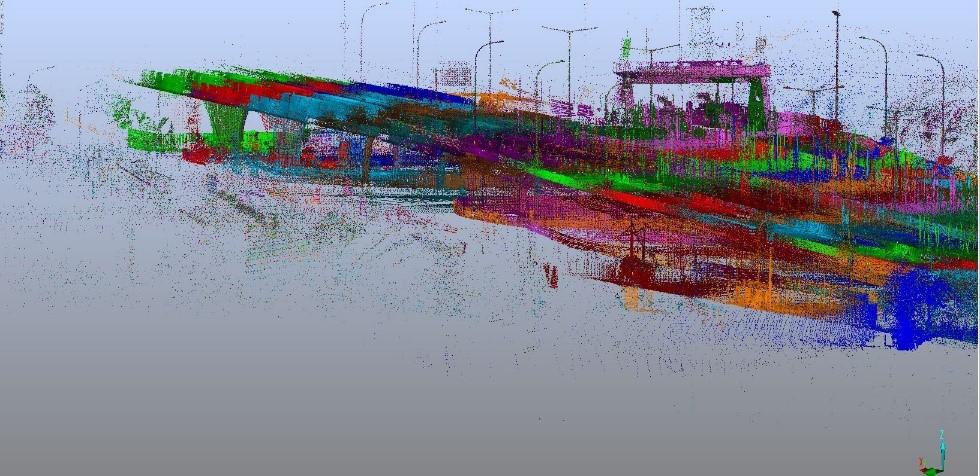
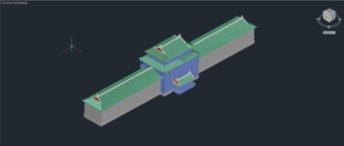
Hasil dari registrasi ini merupakan kumpulan dari beberapa station berdiri alat. Hasil registrasi ini merupakan pointcloud yang sudah siap dilakukan modeling.
Gambar 4. Hasil Registrasi secara isometrik
Untuk kendala dan cara mengatasi kendala dalam proses registrasi akan kami muat di artikel berikutnya…stay tuned guys…
Industri semen merupakan industri dasar. Industri ini merupakan salah satu pendukung utama dalam kegiatan pembangunan infrastruktur fisik. Ketersediaan semen merupakan syarat mutlak bagi tercapainya pembangunan infrastruktur fisik nasional.
Definisi Semen
Semen merupakan sumber daya alam yang berupa batu kapur, tanah liat, pasIr besi dan pasir silika yang melalui proses pembakaran dengan temperatur yang tinggi. Secara umum, semen dapat didefinisikan sebagai perekat hidrolisis yang dihasilkan darii penggilingan. Disebut hidrolis karena dapat bereaksi dengan air dan membentuk zat baru yang bersifat merekat terhadap batuan. (Febri Andini Putri, 2019)
Sejarah semen di Indonesia
Perusahan semen pertama kali didirikan di Indonesia pada tahun 1910 yang sekarang diberi nama PT. Semen Padang. Perusahaan mampu menghasilkan 330.000 ton/tahun. Perusahaan mengembangkan hingga memiliki pabrik ke-4. Kemudian pada tahun 1957 berdiri PT. Semen Gresik di Jawa Timur, tahun 1968 berdiri PT. Semen Tonasa di Pangkep Sulawesi Selatan, tahun 1975 berdiri PT. Semen Cibinong dan PT. Indocement, tahun 1999 berdiri PT. Semen Bosowa di Maros Sulawesi Selatan dan pada tahun 2012 PT. Semen Gresik berubah nama menjadi PT. Semen Indonesia (Febri Andini Putri, 2019)
Bagaimana 3D Laser Scan dalam industri ini?
Dalam perkembangan industri semen, selain memperhatikan kuantitas produksi dari semen, perusahaan juga harus memperhatikan kualitas dari alat produksinya. Baru-baru ini, PT. Zona Spasial bekerja sama dengan PT Indocement Tunggal Prakarsa untuk data aset manajemen bangunan dan alat produksi mereka menggunakan 3D Laser Scan (Gambar 1 & 2).
Gambar 1. Proses akusisi data point cloud di PT. Indocement Tunggal Prakarsa
Gambar 2. Proses akusisi data point cloud di PT. Indocement Tunggal Prakarsa
3D Laser Scan merupakan salah satu service yang kami tawarkan. 3D Laser Scan menghasilkan kumpulan titik yang memiliki nilai geometri (point cloud). 3D Laser Scan menghasilkan point cloud yang baik dengan akurasi yang tinggi dalam merepresentasikan area yang dipindai. Proses pekerjaan ini dilakukan pada tanggal 31 Oktober 2021 sampai dengan 2 November 2021 lalu. Produk akhir yang diserahkan adalah point cloud yang teregistrasi, seperti terlihat pada Gambar 3.
Gambar 3. Point cloud hasil registrasi data 3D laser scan
Point cloud hasil akusisi dimanfaatkan perusahaan untuk keperluannya. Melalui teknologi dan tenaga ahli yang kami miliki, data diakuisisi dengan baik, cepat dan aman. Salah satu tingkat keamanan yang didapat dari 3D Laser Scan adalah mengurangi resiko akses ke area yang sulit dijangkau. Kemampuan tersebut memudahkan mobilisasi dan menghasilkan model 3D seperti aslinya dengan kecepatan akuisisi hingga 1 jt titik/detik.
Detail dan cepat menjadi topik pertama saat mendengar 3D Laser Scanner. Kehebatannya yang mampu menghasilkan lebih dari 100.000 point cloud dalam satu detik menjadikan keunggulan alat ini (Faro scan,2016 ). Bagi surveyor, 3D Laser Scan sudah primadona untuk memudahkan pekerjaan dilapangan seperti untuk pekerjaan konstruksi, perencanaan jembatan, pergeseran suatu bangunan dan lain sebagainya. Namun, taukah anda kalau 3D Laser Scan juga bermanfaat untuk bidang arsitektur?
Kami melakukan sebuah survei random sampling dan mendapati 8 dari 10 arsitek tidak mengetahui manfaat dari 3D laser scan untuk bidangnya. Banyak dari arsitek masih menggunakan alat konvensional seperi meteran atau alat ukur manual untuk menghitung volume bangunan, membuat perencanaan desain interior, sampai membuat drawing untuk bangunan.
Sebagai penyedia jasa dibidang survei dan pemetaan PT. Zona Spasial menghadirkan “Laser Scanning Architechture” melalui kehebatan Faro Focus 3D Laser Scan. Berdasarkan pengalaman yang dimiliki oleh PT. Zona Spasial, berikut ini manfaat dari 3D Laser Scan pada bidang arsitektur :
Membuat model sama dengan aslinya
Produk akhir yang dimiliki oleh 3D laser scan yakni point cloud mampu menampilkan realitas dari tempat maupun bangunan yang direkam olehnya. Point cloud tersebut juga memiliki tingkat keakuratan yang sangat mendetail dalam pengambilan datanya. Selain akurat data yang dihasilkan juga memiliki intensitas warna yang sebenarnya sehingga mempermudah dalam interpretasi objek. Hal ini dapat membantu bidang arsitektur dalam membuat 3D model suatu bangunan, mengidentifikasi kehilangan maupun kerusakan dari suatu komponen, hingga keperluan rekonstruksi bangunan.
Gambar 1.1. Real time picture
Gambar 1.2. As-build modelling 3D from 3D Laser Scan
Sebagai salah satu contoh, PT. Zona Spasial berperan dalam bidang arsitektur untuk pembuatan model 3D dari suatu bangunan bersejarah. Bangunan bersejarah memiliki nilai penting yang harus dijaga kelestariannya. Karena umurnya yang tidak muda, membuat beberapa dari bangunan bersejarah belum memiliki dokumen detail bangunan saat awal berdiri. Kendati demikian, 3D laser scan dapat menjadi jalan keluar dalam membuat model 3D dari bangunan bersejarah. Bukan hanya menghemat waktu, namun 3D Laser scan juga dapat mengehemat biaya. Pada Gambar 1.1 merupakan dokumentasi bangunan yang diambil, sedangkan Gambar 1.2 menampilkan hasil dari model 3D bangunan besejarah tersebut yang sudah diolah menggunakan data point cloud 3D Laser Scan.
Pengukuran luas tanpa harus bersentuhan langsung
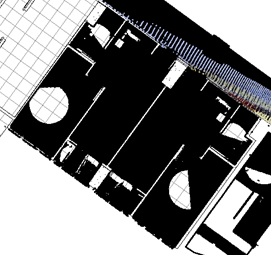
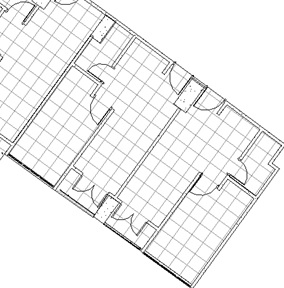
Jika sebelumnya mengukur tinggi dan luasan bangunan dilakukan oleh arsitek menggunakan meteran secara manual, kini 3D Laser Scan dapat mempermudah pekerjaan tersebut menjadi lebih praktis. Proses penyiaman point cloud yang sangat mendetail pada area bangunan membuat arsitek tidak perlu lagi menggunakan cara lama. Melalui point cloud yang telah diolah pada software pengolah data, arsitek dapat mengitung secara cepat, akurat, dan praktis menggunakan layar monitor saja. Selain memiliki data yang akurat, arsitek juga dapat mengemat waktu dan biaya dengan tidak harus bersentuhan langsung dengan objek terkait.
Gambar 2.1.Floor Drawing 2D Bertampalan Dengan Point Cloud
Gambar 2.2. Hasil Floor Drawing 2D
Gambar 2.3. Hasil 3D Bangunan Bertampalan Dengan Point Cloud
Sebuah project membutuhkan data tinggi dan luasan untuk keperluan rekonstruksi bangunan mereka. Dengan memanfaatkan 3D Laser Scan, PT. Zona Spasial melakukan pengambilan data sehingga menghasilkan point cloud yang merepresentasikan bangunan tersebut. Memiliki data tinggi dan luasan merupakan hal penting bagi arsitek dalam suatu perencanaan bangunan. Data tersebut dapat dipakai untuk membuat rancangan anggaran biaya (RAB) dari suatu bangunan yang akan dikerjakan. Seperti pada Gambar 2.1 menampilkan flow drawing 2D dari hasil point cloud, dan Gambar 2.2 tampilan floor drawing 2d sebagai contoh keperluan data luasan untuk analisa lebih lanjut. Pada Gambar 2.3 dapat dilihat bentuk 3D bangunan tersebut yang dibuat berdasarkan point cloud pada area bangunan yang berfungsi untuk merepresentasikan bangunan scara 3D. Untuk area yang luas, 3D laser scan memudahkan arsitek dalam pengukuran dan tentunya aman untuk pengukuran tinggi.
Dokumentasi area pekerjaan secara realistis
Kemampuan dari 3D laser scan yang dapat menggapai setiap sudut dari objek yang bersentuhan langsung dengannya, membuat banyak dari 3D laser scan dimanfaatkan untuk mendokumentasikan objek tersebut. PT. Zona Spasial telah berpengalaman dalam pembuatan model 3D dari bangunan untuk keperluan arsitektur. Pembuatan model 3D dilakukan oleh engineer yang telah berpengalaman dalam merektifikasi point cloud, sehingga dapat merepresentasikan model 3D yang seusai dengan bentuk aslinya. Pada bidang arsitektur 3D laser scan dimanfaatkan untuk mendokumentasikan bangunan untuk keperluan baik interior maupun ekterior. Melalui software yang kami gunakan, kami membuat dokumentasi dari model 3D bangunan dengan material dan warna bangunan yang menyerupai aslinya. Selain keperluan desain interior maupun ekterior, model 3D ini juga bisa dijadikan animasi 3D, rancangan maket virtual, video mapping, virtual tour, dan analisis lainnya yang diperlukan bidang arsitektur.
Gambar 3.1 Point Cloud Model
Gambar 3.2 Pertampalan Point Cloud dengan Model 3D
Gambar 3.3 Model 3D As.Build
3D Laser Scan merupakan teknologi yang memiliki kemampuan cepat dan tepat dalam pengambilan data dalam hal ini adalah bangunan.Melalui kemampuan 3D Lase Scan yang ia miliki, dapat membuat arsitek mempemudah pekejaanya hingga 80%. Selain itu juga, arsitek dapat menekan waktu dan biaya yang diperlukan dalam proses pengerjaan suatu project. PT. Zona Spasial memiliki pengalaman dalam 3D Laser Scan dan telah banyak membantu arsitektur maupun entitas lain yang berkaitan dalam mengakuisisi data bangunan maupun keperluan lainnya yang diinginkan.
Pada setiap aerial survey dengan pesawat nirawak akan ditemui daerah-daerah dengan vegetasi yang padat maupun daerah terbuka. Untuk setiap daerah dengan perbedaan vegetasi tersebut perlu dilakukan perencanaan aerial survey yang baik sehingga sesuai dengan hasil yang diharapkan.
Perencanaan ini juga meliputi perencanaan sensor yang akan dipakai dalam aerial survey. Seperti diketahui bahwa sensor pada aerial survey bermacam-macam. (lihat pembahasan https://zonaspasial.com/2020/01/efektivitas-pesawat-nirawak-untuk-pemetaan/ ). Khusus pada bahasan ini akan dibahas masalah daya tembus pada vegetasi.
Sensor Kamera Foto Udara
Sensor kamera merupakan sensor pasif. Sensor pasif ini berarti sensor hanya akan menangkap sinar matahari yang dipantulkan oleh obyek. Obyek yang tertutup oleh obyek lain tidak akan mampu dicapture oleh sensor. Demikian juga permukaan tanah yang tertutup oleh vegetasi, walaupun terdapat bukaan disela-sela dedaunan. Obyek yang terlihat di sela-sela daunan terlalu sempit untuk dicapture oleh sensor kamera, sehingga pantulan sinar matahari tidak dapat ditangkap oleh sensor. Kemungkinan yang lain karena tingkat kecerahan obyek yang tertutup oleh daun-daun kanopi pohon sangat gelap sehingga tidak mampu ditangkap oleh sensor.
Daya tembus ini sensor foto tersebut merupakan salah satu kekurangan foto udara untuk aerial survey. Tetapi kemampuan sensor foto dalam menangkap warna merupakan keunggulan dibanding sensor LiDAR. Sensor foto dalam menangkap warna (RGB sensor) mampu memberikan keunggulan dalam identifikasi obyek.
Sensor LiDAR
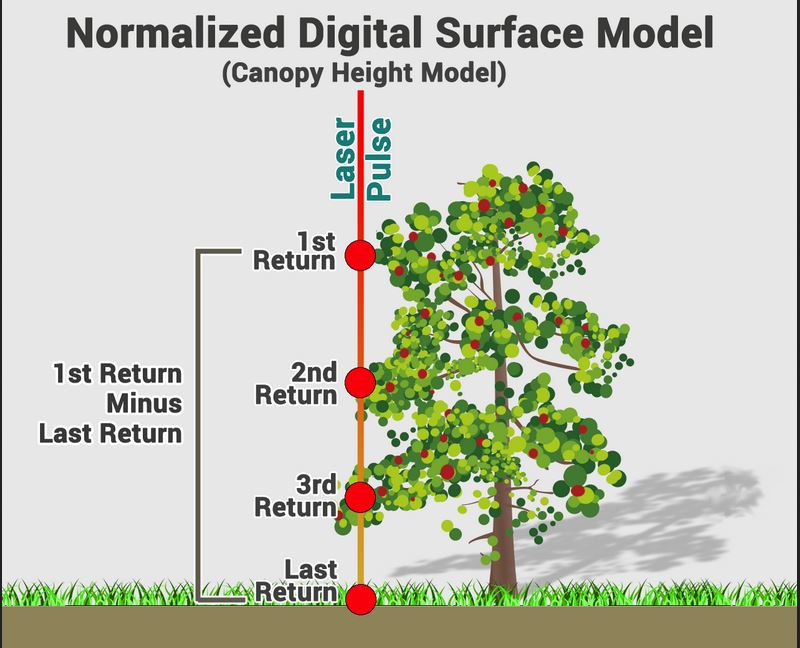
Sensor aktif dari LiDAR mampu memancarkan pulse dan menangkap kembali hasilnya. Sensor aktif ini menghasilkan pointcloud dari pulse yang dipancarkan ke permukaan. Kemampuan pulse LiDAR dalam menembus kanopi merupakan keunggulannya. Dalam aerialsurvey dengan sensor LiDAR hal ini disebut Canopy High Models/Normalized Digital Surface Model (nDSM). Artinya pulse LiDAR mempunyai kemampuan dalam menembus kanopi melalui sela-sela daun sehingga tangkapan kembali pulse tersebut oleh sensor akan memberikan tinggi permukaan tanah sebenarnya.
Gambar 1. Perjalanan Pulse LiDAR (sumber: gisgeography.com)
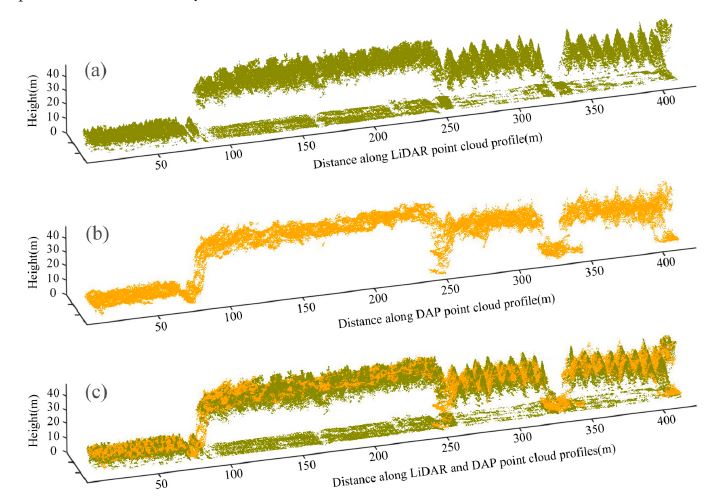
Terdapat perbandingan yang telah dilakukan terhadap sensor foto udara dengan sensor LiDAR. Hasil peneltian tersebut membuktikan bahwa sensor LiDAR memang lebih unggul dalam hal menembus kanopi pepohonan.
Gambar 2. Perbandingan hasil pointcloud ketinggian LiDAR dan Foto Udara (sumber: Comparison of UAV LiDAR and Digital Aerial Photogrammetry Point Clouds for Estimating Forest Structural Attributes in Subtropical Planted Forests by Lin Cao, Hau Liu dkk)
Lalu Bagaimana Pemanfaatannya?
Seperti disinggung pada pembicaraan sebelumnya, bahwa dalam perencaan untuk aerialsurvey harus dilihat Area of Interest (AoI) yang akan disurvei, sehingga sensor yang digunakan akan sesuai. Untuk AoI dengan kanopi padat maka sensor LiDAR dapat digunakan pada pesawat Nirawak, tetapi jika kerapatan kanopi pohon tidak terlalu rapat maka penggunaan foto udara biasa dengan pesawat nirawak sudah mencukupi.
Erosi tanah dari daerah hulu sungai seringkali menjadi sebab adanya pendangkalan sungai. Belum lagi masalah sampah yang dibuang ke sungai. Timbunan material baik alami maupun hasil limbah manusia yang berupa sampah, lama kelamaan dapat menyebabkan aliran sungai tidak lagi lancar. Ini yang kemudian menyebabkan luapan air dari sungai tersebut, jika daya tampungnya menurun.
Pendangkalan Sungai dan Akibatnya
Erosi pada tepi sungai maupun dasar sungai pada daerah hulu menjadi tak terhidarkan ketika alih fungsi lahan terjadi. Penyerapan air hujan oleh tumbuhan dan pohon menjadi berkurang karena alih fungsi tersebut. Penyerapan ini berfungsi menjaga air tidak mengalir di permukaan sehingga dapat mengikis muka tanah. Kikisan muka tanah tersebut pada akhirnya akan menuju sungai dan diendapkan sebagai sedimentasi padat.
Laju pengendapan sedimentasi yang besar tentu saja semakin mempercepat proses pendangkalan. Pengendapan di dasar sungai maupun di bagian tepi sungai membuat daya tampung sungai menurun.
Hal lain yang disinggung di atas adalah adanya pembuangan sampah yang juga akan mengakibatkan pendangkalan sungai. Daya tampung air pada sungai yang sudah menurun akibat laju endapan sedimen dari sejak daerah hulu, diperparah dengan pembuangan sampah di sungai tersebut. Luapan air akan terjadi jika sungai tidak lagi mampu menampung air.
Selain banjir, yang perlu diperhatikan juga ekosistem yang rusak akibat pendangkalan ini. Ekosistem yang rusak menyebabkan keragaman hewan ikut hilang.
Gambar 1. Sedimentasi yang mengendap di sungai
Monitoring Pendangkalan Sungai
Untuk mengurangi resiko meluapnya air dari sungai akibat pendangkalan yang terjadi, maka perlu dilakukan monitoring terhadap sungai tersebut. Monitoring bisa dilakukan secara berkala. Untuk sungai yang relatif sempit dan tidak dalam, monitoring lebih mudah dilakukan. Tetapi jika sungai yang dalam dan lebar, maka membutuhkan pengukuran lebar dan kedalaman secara berkala yang lebih rumit.
Gambar 2. Hasil Pengukuran Bathymetri Sungai CImanuk Indramayu
Pengukuran kedalaman sungai ini bisa dilakukan dengan menggunakan alat-alat survei batimetri. Alat survei kedalaman sungai ini bisa menggunkan Single Beam Echosounder (SBES). Penggunaannya yang mudah dan akurasi yang baik, sangat mencukupi untuk pengukuran kedalaman sungai. Hasil pengukuran kedalam yang periodik ini dapat digunakan sebagai perencanaan tata kelola sungai, misalnya pengerukan.
Wahana pembawa alat survei ini bisa menggunakan kapal boat biasa maupun menggunakan Autonomous Survei Vessel (ASV).
Gambar 3. Autoboat ASV
Penggunaan ASV akan lebih efektif untuk sungai karena beberapa hal:
Mudah dalam mobilisasi
Sesuai dengan ukuran sungai yang akan disurvei
Mudah dalam pengoperasian
Relatif lebih murah dibanding biaya sewa boat
Lebih aman karena tidak berawak
Hal-hal di atas tidak bisa dilakukan oleh boat biasa, sehingga pilihan menggunakan ASV adalah pilihan yang lebih baik.
Penggunaan 3D laser scan untuk melakukan survey bagi dunia perkapalan sudah lama terjadi. Kecepatan dalam pengambilan data dan ketelitian dalam penggambaran adalah alasan utama penggunaan laser scan dan 3D model tersebut. Hasil akhir dari survei 3D Laser Scan tersebut dapat dimanfaatkan untuk navigasi kapal, retrofit, refurbishment, renovation maupun asuransi.
Model 3D kapal untuk As Built
Salah satu kegunaan as built kapal adalah untuk mengetahui ukuran dan bentuk sebenarnya dari kapal tersebut, sehingga jika dilakukan perubahan maupun perbaikan maka marine engineers dapat menyesuaikan. 3D laser scan mampu bekerja optimal untuk memberikan model yang akurat. Akurasi ini penting bagi maintenance karena perbaikan harus sesuai/tepat dengan ukuran yang diberikan.
Gambar 1. As Built Kapal
As built ini juga dapat dimanfaatkan untuk kebutuhan lain, misalnya marketing. Calon penyewa kapal akan dimudahkan dalam inspeksi sebelum melakukan transaksi penyewaan. Gambar 3D yang aktual dan presisi mampu disajikan dari hasil modeling 3D laser scan.
Retrofit, Refurbishment & Structural Alteration
Marine engineer dapat melakukan perubahan pada sebuah kapal. Baik itu perubahan fungsi maupun perubahan area pada kapal. Perubahan ini memerlukan gambar sebelum dan sesudah secara detail dan akurat. 3D laser scan dapat membantu dalam mendapatkan gambaran akurat dari sebuah kapal maupun bagian-bagian dalam kapal.
Gambar 2. Hull, propeller dan struktur dalam kapal
Setelah mendapatkan gambar dan ukuran yang sesuai dengan sebenarnya, maka marine engineer akan membuat rencana kerja dan melakukan perubahan tersebut. Setelah selesai maka perlu dilakukan survei 3D Laser scan kembali untuk mendapatkan gambaran setelah dilakukan perubahan dan as built bagi maintenance.
Banjir yang terjadi hampir tiap musim penghujan merupakan pengingat kita untuk menata kembali sungai dan Daerah Aliran Sungai (DAS) di sekitarnya. Penataan ini baik dengan nama normalisasi maupun naturalisasi selalu membutuhkan peta eksisting dan terbaru.
Minimal ada 2 (dua) peta yang harus tersedia untuk melakukan perencanaan tersebut, yaitu peta batimetri kedalaman sungai dan peta situasi DAS. Kedua peta tersebut jika dikombinasikan akan menjadi dasar perencanaan penataan sungai dan DAS.
Peta Batimetri untuk Kedalaman Sungai
Sedimentasi baik secara alami, yaitu lumpur dan sedimen dari hulu yang terbawa arus maupun sedimentasi akibat sampah yang dibuang di sungai, merupakan penyebab pendangkalan sungai. Pendangkalan ini menyebabkan daya tampung sungai menjadi berkurang dan bisa menyebabkan meluapnya sungai, jika terjadi kenaikan volume air pada sungai tersebut.
Bagaimana peta kedalaman sungai didapatkan?
Tentu saja survei batimetri perlu dilakukan untuk mendapatkan peta tersebut. Dengan Single Beam Echosounder (SBES) sudah cukup jika yang diharapkan adalah kedalaman sungai pada waktu tertentu. SBES merupakan salah satu alat akustik yang dapat dibawa oleh moda transportasi sungai biasa maupun dengan ASV (Autonomous Survey Vessel)/Kapal survei nirawak. Kapal survei Nirawak (ASV) ini sangat fleksibel dalam mobilisasi, sehingga penggunaannya akan memudahkan dalam pekerjaan survei batimetri.
Gambar 1. Autonomous Survey Vessel (ASV) untuk survey batimetri
Dengan menggunakan model autopilot dan jalur survei yang telah ditentukan, ASV ini dapat membawa SBES dan merekam kedalaman sungai secara otomatis. Dilengkapi dengan positioning RTK (Real Time Kinematik), maka koordinat serta kedalaman dapa diplot menjadi peta batimetri. Melalui pengolahan data yang relative mudah, maka kita akan tahu kedalam sungai pada waktu tertentu (pada saat survei dilakukan). Jika kita melakukan survei berkala, maka akan didapatkan laju endapan sedimentasi (baik natural maupun sampah).
Gambar 2. Peta Batimetri kedalaman perairan dan proses surveynya
Peta batimetri yang didapatkan, bisa dijadikan dasar pengerukan sungai untuk mendapatkan daya tampung sesuai dengan yang diharapkan.
Peta DAS (Daerah Aliran Sungai)
Peta Daerah Aliran Sungai adalah peta yang berisi informasi obyek-obyek pada sekitar aliran sungai tersebut. Obyek tersebut bisa berupa tutupan lahan, pemukiman dan lain sebagainya. Daerah Aliran Sungai (DAS) merupakan penyangga dari sungai tersebut. Pemanfaatan lahan DAS ini seringkali berbeda dari yang sudah ditetapkan pada Rencana Tata Ruang Wilayah (RTRW). Hal ini karena keterbatasan lahan hunian maupun lainnya.
Gambar 3. Jenis-jenis Drone/UAV
Pemetaan DAS ini bisa dilakukan dengan berbagai cara baik darat maupun udara. Pemetaan dengan darat, lebih lama serta berbiaya relatif lebih mahal. Sedangkan pemetaan dengan foto udara menggunakan pesawat Nirawak akan memprcepat proses pengadaan peta DAS. Hasil peta foto dari pesawat nirawak akan diolah menjadi DSM, DTM maupun tutupan lahan.
Gambar 4. Sebagian Daerah Aliran Sungai (DAS)
Peta tutupan lahan tersebut dapat digunakan untuk perencanaan terhadap DAS maupun sungai itu sendiri (baik naturalisasi maupun normalisasi). Perubahan peruntukan kawasan sekitar sungai tentu saja dapat memperkecil lebar sungai. Bahkan jika ada bangunan di bibir sungai, maka aliran sungai akan menjadi terhambat.
Dengan menggunakan peta tersebut, maka rencana untuk memperlebar maupun memperbaiki aliran sungai akan bisa dilakukan dengan lebih baik. Jumlah rumah akan terhitung, luasan lahan kepemilikan dapat terhitung juga, sehingga ganti rugi (jika akan dilakukan penggusuran) akan bisa langsung dilakukan perhitungan.
Penggabungan Data Batimetri dan Data Foto Udara
Setelah kedua data tersebut didapatkan, maka penggabungan dapat dilakukan, karena kedua peta tersebut mengacu pada koordinat global yang sama. Tentu saja titik kontrol terhadap kedua peta tersebut harus dalam sistem koordinat yang sama.
Dengan penggabungan kedua peta tersebut, maka kita akan mempunyai peta perencanaan yang lebih bagus lagi. Beberapa hal yang bisa dilakukan dengan menggunakan kedua peta tersebut antara lain:
Seringkali terdapat pertanyaan dari client maupun calon client, seberapa efektif pesawat nirawak digunakan untuk pemetaan? Dan berapa luas area efektif yang dapat dipetakan dengan pesawat nirawak?
Tentu saja pertanyaan itu wajar, karena penggunaan pesawat nirawak untuk pemetaan relatif merupakan teknologi baru bagi client maupun calon client. Kami akan mencoba menjawabnya dalam artikel ini.
Pemetaan apa yang dapat dilakukan dengan pesawat nirawak?
Pemetaan yang biasa dilakukan oleh client/calon client biasanya adalah pemetaan spesifik atau yang biasa disebut pemetaan tematik. Cakupan luasan yang khusus maupun informasi yang akan ditampilkan juga spesifik, maka pemetaan ini disebut pemetaan tematik. Beberapa pemetaan yang biasanya dilakukan secara tematik antara lain:
Pemetaan batas kepemilikan lahan
Pemetaan kontur pada area tertentu
Pemetaan tutupan lahan (Landuse)
Dan pemetaan tematik lainnya.
Selain itu ada juga pemetaan lebih spesifik seperti pemetaan jalur pipa, jalur jalan, sebaran kebocoran gas (biasanya hal ini masuk dalam bidang inspeksi), pemetaan 3D (3D smart city, termasuk di dalamnya), pemetaan untuk pemantauan kemajuan pembangunan infrastruktur dan lain-lain.
Lalu bisakah semua itu dilakukan dengan pesawat nirawak? Tentu saja bisa.
Hanya saja mungkin sensor yang dibawa berbeda-beda. Sensor ini disesuaikan dengan kebutuhan pengguna. Misalnya untuk kebocoran gas, maka tidak bisa digunakan kamera biasa, harus dengan kamera pendektesi panas (thermalcamera). Demikian juga jika akan melakukan pemetaan untuk kawasan yang padat vegetasi, maka pilihan terbaik sensor adalah dengan LiDAR Drone, karena kemampuannya yang unggul dalam menembus vegetasi.
Jenis Sensor pada Pesawat Nirawak
Kesimpulannya, kemampuan pesawat nirawak untuk pemetaan sangat luas cakupannya. Hanya saja sensor yang dibawa berbeda-beda sesuai dengan kebutuhan.
Berapa cakupan efektif pesawat nirawak untuk pemetaan ?
Saat ini jenis pesawat nirawak dipasaran sangat beragam. Dari yang murah sampai dengan yang mahal sekali. Demikian juga endurance yang ditawarkan sangat beragam, mulai yang hanya 10 menit sampai dengan lebih dari 2 jam. Demikian juga sensor yang dapat dibawa, sangat beragam. Keragaman ini memungkinkan pengguna lebih mudah menyesuaikan dengan kebutuhannya.
Untuk menjawab pertanyaan efektivitas luasan yang dapat dipetakan dengan pesawat nirawak, tentu saja harus dihubungkan dengan endurance. Semakin lama endurance, akan semakin luas cakupan yang diperoleh. Tetapi ini tentu saja ada batasan, yaitu payload yang mampu dibawa oleh pesawat. Endurance yang lama memerlukan baterei dengan daya yang besar, baterei dengan daya besar akan menambah beban pesawat nirawak yang ada batas payloadnya.
Kunci dari efektivitas penggunaan pesawat nirawak adalah pemahaman tentang kebutuhan pemetaan yang akan dilakukan. Jika pemetaan yang akan dilakukan hanya mencakup luasan kecil, atau hanya area-area tertentu saja, maka kebutuhan ini bisa diatasi dengan menggunakan pesawat nirawak jenis multirotor. Tetapi jika luasan yang akan dipetakan mencakup area yang besar maka kebutuhan ini bisa dipenuhi dengan menggunakan pesawat nirawak jenis fixwing/flywing, yang mempunyai endurance lebih lama.
Dengan demikian, pertanyaan mengenai cakupan luas yang menjadi pertanyaan terjawab sudah, yaitu antara luasan area yang sempit +/- 1Ha sampai dengan 10.000 Ha. Di atas luasan tersebut, maka penggunaan pesawat nirawak menjadi tidak efektif karena waktu yang dibutuhkan untuk melakukan survei menjadi lebih lama.