3D Inspection untuk Tangki dengan Laser Scan
Dalam artikel ini yang akan dibahas tentang 3D Inspection tank dengan menggunakan data pointcloud dari Laser Scan. Penggunaan inspeksi 3D untuk tangki ini merupakan bagian dari maintenance yang disyaratkan.
Laser Scan untuk mendapatkan 3D Model Tangki
Peruntukan laser scan dalam analisis tangki adalah untuk mendapatkan pointcloud dari tangka yang akan diinspeksi. Laser scan survei harus mampu men-capture seluruh bagian dari tangki, sehingga akan memudahkan dalam pembentukan model 3 dimensi. Proses selanjutnya, tentu saja adalah registrasi dari hasil scan (https://zonaspasial.com/2019/10/registrasi-point-cloud-terrestrial-laser-scan-dan-cara-melakukannya-dengan-benar/). Setelah terbentuk pointcloud yang benar dari registrasi maka dapat dilakukan proses selanjutnya yanitu cleaning. Cleaning ini untuk membuang/menghapus obyek-obyek di luar tangki yang akan dimodelkan. Proses ini untuk memudahkan modeler dalam membangun obyek 3 Dimensi.
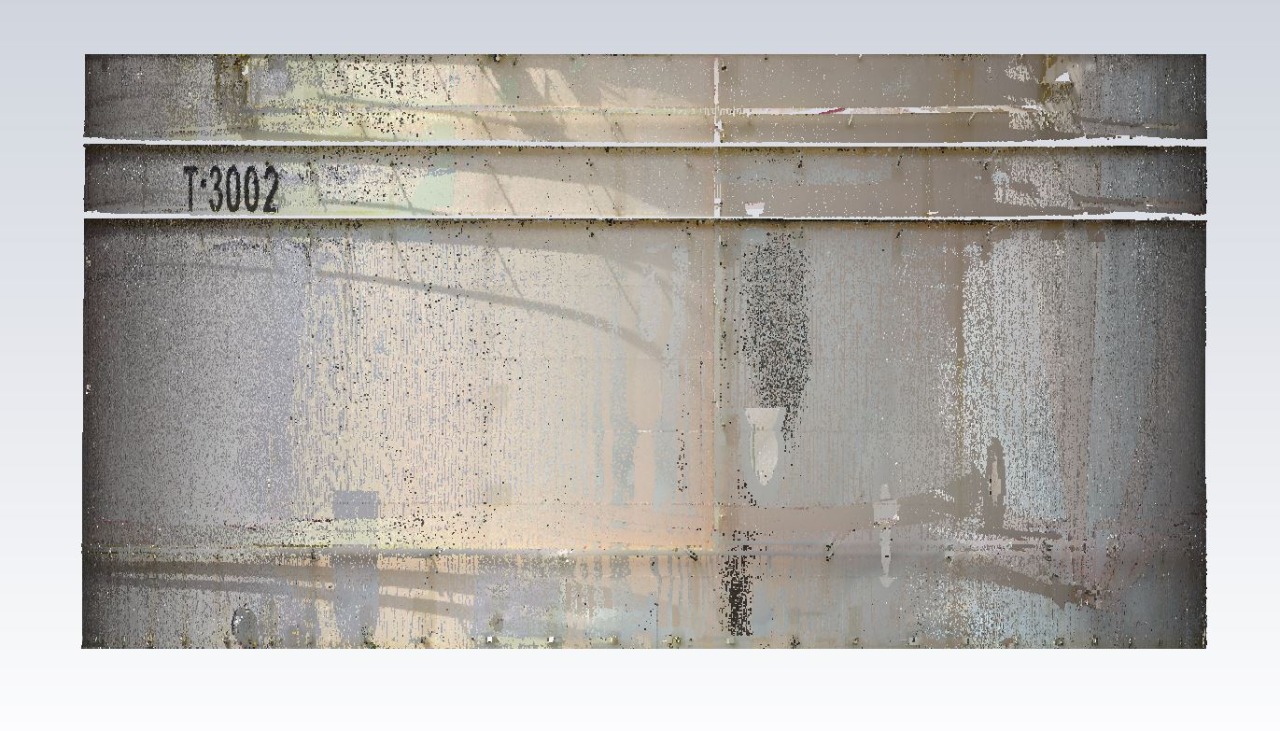
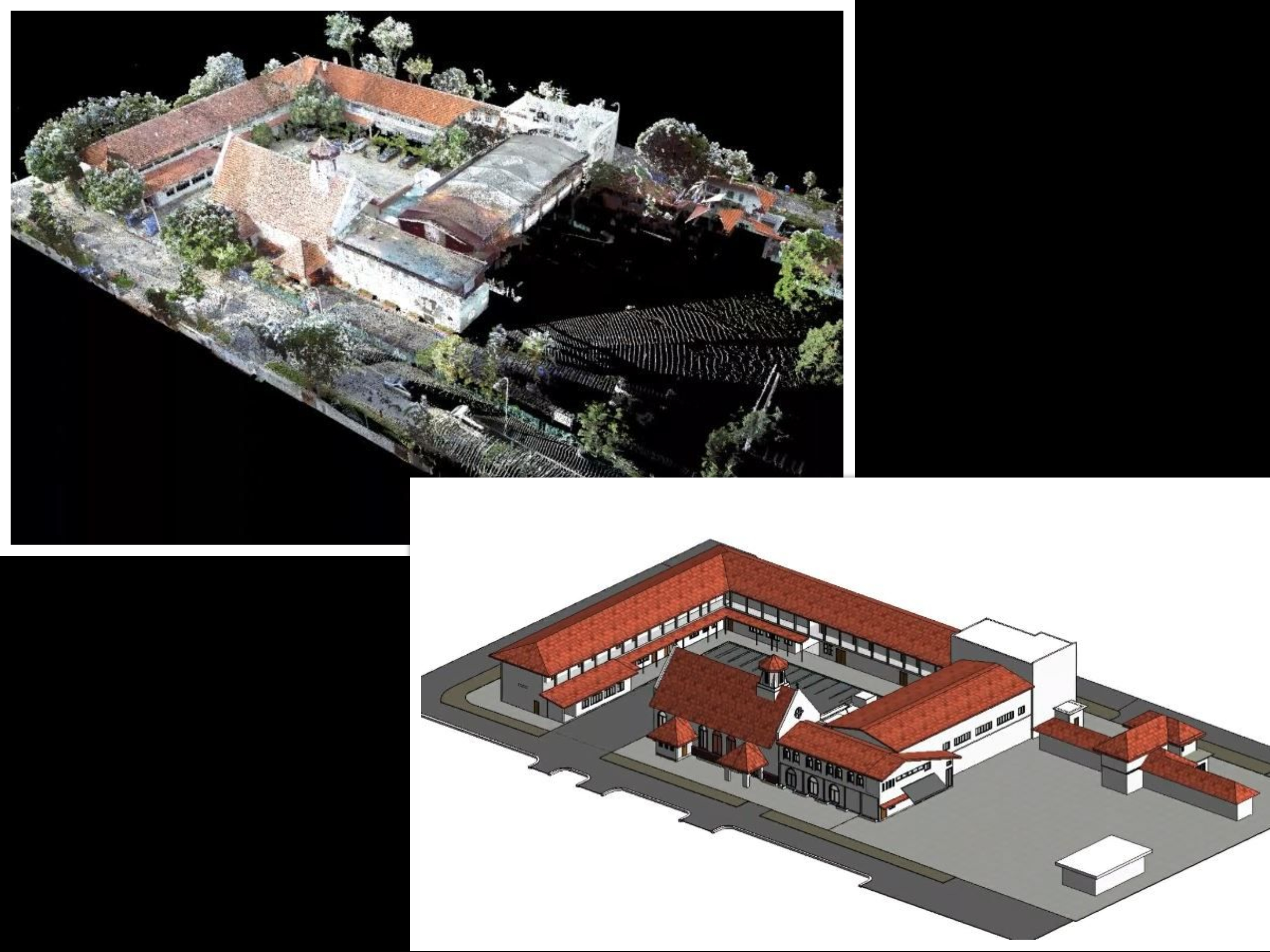
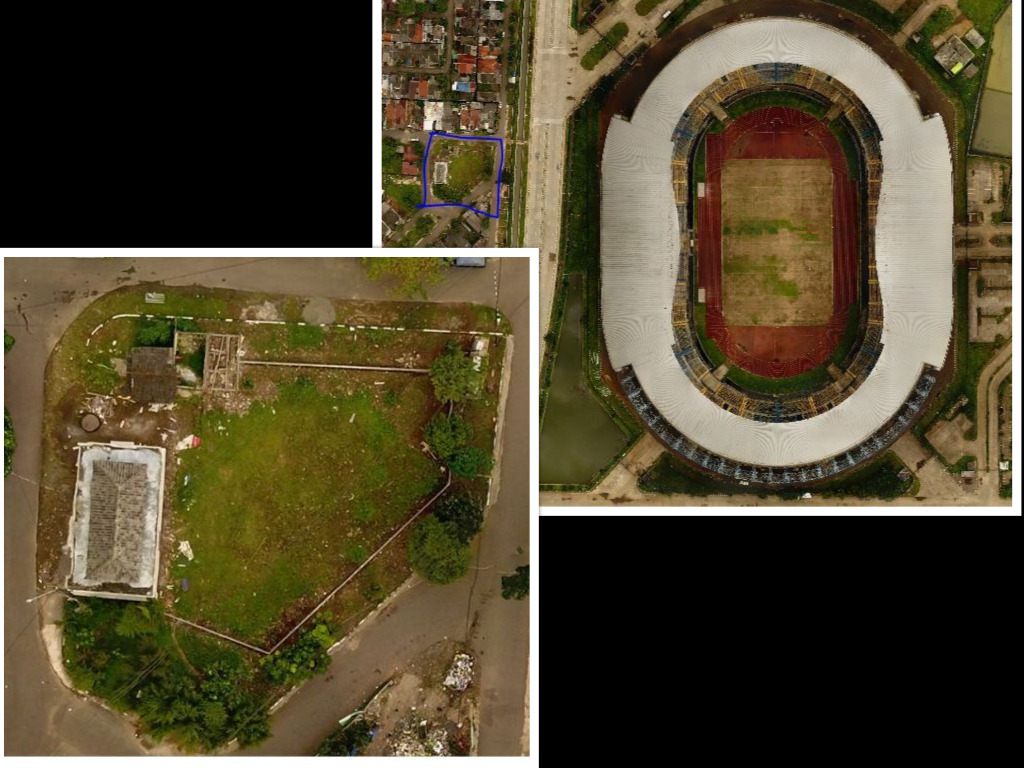
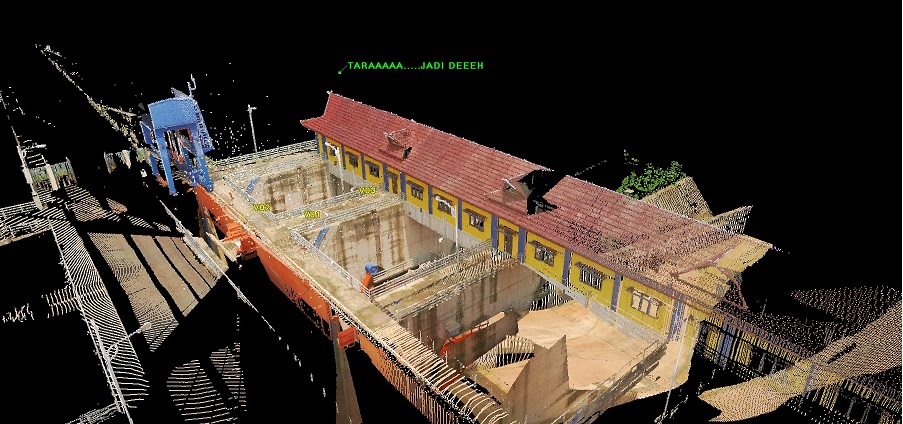
Gambar1. Tank Pointcloud
Setelah pointcloud dibersihkan dari obyek yang tidak diperlukan, maka proses selanjutnya adalah membuat mesh modeling atau model permukaan tangki. Model permukaan ini yang akan membentuk tangka seperti keadaan sebenarnya.
Bentuk tangka yang seperti aslinya (as is) akan digunakan sebagai base analisys. Permukaan yang terlihat secara visual (pandangan mata) seringkali berbeda dengan yang didapatkan dari hasil mesh modeling ini. Lekukan-lekukan kecil tidak akan terlihat oleh mata manusia. Bahkan dalam gambar hasil mesh model, mata kita seringkali tidak menemukan lekukan yang terjadi oleh berbagai sebab. Untuk itulah analisis perlu dilakukan.

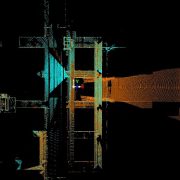
Gambar 2. Mesh Modeling Tangki
Analisis 3D Inspection
Setelah model permukaan (mesh model) terbentuk, maka proses 3D Inspection dapat dilakukan terhadap permukaan tangki. Analisa ini akan membentuk warna berbeda bagi setiap permukaan. Tentu saja harus ada rujukan yang pasti sehingga permukaan yang melengkung dapat teridentifikasi.
Permukaan melengkung ini dapat berupa lengkungan ke dalam maupun lengkungan ke luar. Perbedaan warna dari permukaan menunjukkan kelengkungan permukaan yang dianalisa.
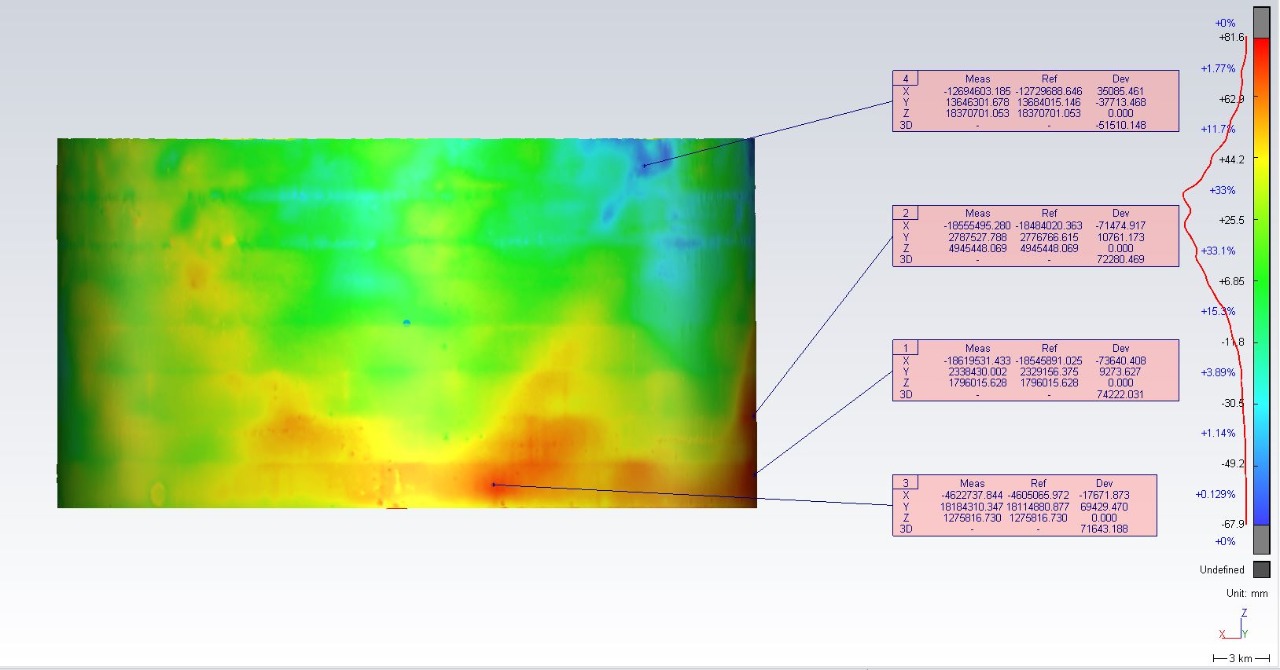
Gambar 3. 3D Inspection
Selain 3D Inspection, analisis bisa ditambahkan dengan membentangkan permukaan menjadi color map. Dengan membentangkan permukaan tangki maka akan lebih mudah secara visual dilakukan Analisa.
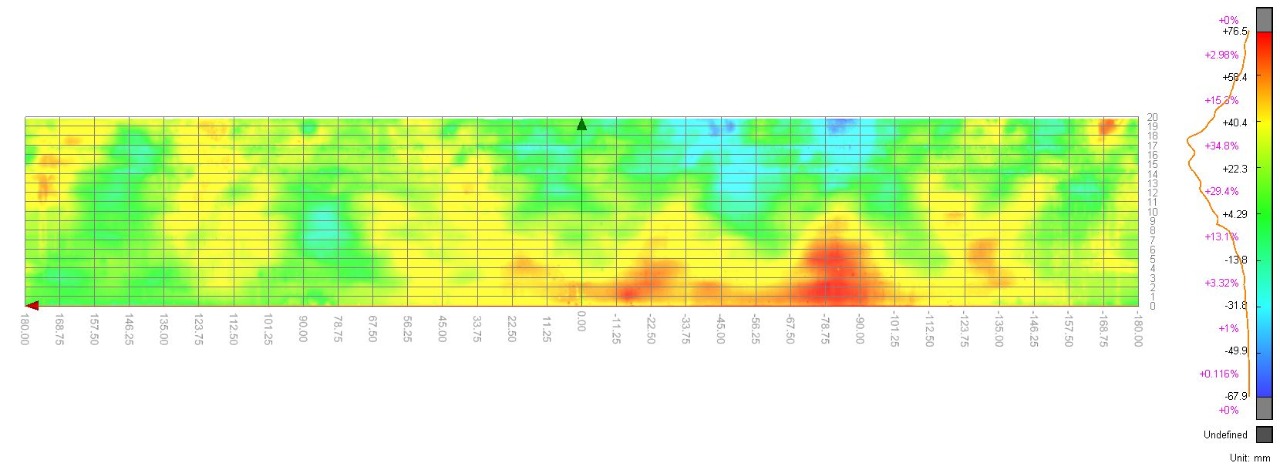
Gambar 4. Tank Heat Map