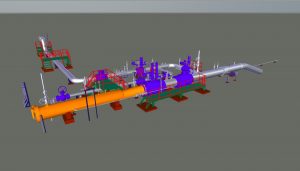
Dinamika industri konstruksi saat ini menuntut akurasi yang lebih tinggi dan risiko yang lebih rendah. Kita tidak lagi hanya bicara tentang membangun fisik, tetapi tentang bagaimana mengelola data bangunan tersebut. Video di atas menunjukkan bagaimana 3D BIM (Building Information Modeling) bekerja—bukan sekadar visualisasi, melainkan sebuah ekosistem data yang terintegrasi.
Bagi para pemangku kepentingan di industri properti, memahami peran BIM adalah langkah awal dalam mengoptimalkan seluruh siklus hidup aset, mulai dari meja desain hingga operasional harian gedung.
Sinkronisasi Data: Meminimalisir Ketidakpastian di Lapangan
Salah satu tantangan terbesar developer adalah adanya gap komunikasi antara dokumen desain dengan realitas di lapangan. 3D BIM hadir untuk menjembatani celah tersebut melalui:
Koordinasi Lintas Disiplin: Arsitektur, struktur, dan MEP kini berada dalam satu bahasa visual yang sama. Hal ini memungkinkan tim proyek mendeteksi potensi konflik teknis secara dini sebelum mobilisasi alat berat dimulai.
Efisiensi Biaya Melalui Presisi: Dengan visualisasi yang kaya data, estimasi kebutuhan material menjadi lebih terukur. Hal ini membantu manajemen dalam mengontrol anggaran secara lebih ketat dan transparan.
Nilai Tambah pada Fase Pasca-Konstruksi (Maintenance)
Keunggulan teknis dari model BIM sebenarnya baru benar-benar terasa ketika gedung mulai beroperasi. Model ini berfungsi sebagai “arsip hidup” yang mendukung efisiensi tim manajemen fasilitas:
Navigasi Infrastruktur Tersembunyi: Tim pemeliharaan memiliki panduan presisi mengenai letak instalasi pipa atau kelistrikan di dalam dinding, sehingga proses perbaikan atau perawatan berkala dapat dilakukan dengan cepat tanpa merusak struktur secara berlebihan.
Keberlanjutan Nilai Aset: Gedung yang dikelola dengan data digital yang rapi cenderung memiliki biaya operasional yang lebih rendah dan nilai investasi yang lebih terjaga dalam jangka panjang.
Melangkah Menuju Konstruksi Berbasis Data
Implementasi 3D BIM memang memerlukan ketelitian dalam penyusunan modelnya, namun hasil yang diperoleh dalam hal efisiensi dan mitigasi risiko jauh melampaui investasi di awal. Visualisasi yang Anda lihat pada video di atas adalah salah satu contoh bagaimana teknologi ini memberikan kejelasan bagi setiap keputusan teknis yang diambil.
Penanganan Raw Data (data mentah) yang didapatkan dari Terrestrial Laser Scan merupakan hal yang krusial. Penanganan data yang baik akan mempermudah proses selanjutnya. Raw Data dari jalan tol akses Tanjung Priok ini melibatkan data yang sangat besar, sehingga memerlukan strategi tertentu sehingga proses registrasi dapat dilakukan dengan lebih baik. Strategi registrasi yang kami ambil antara lain sebagai berikut:
1. Jumlah Data Scan yang Banyak
Banyaknya data mentah akan menyulitkan saat registrasi jika dilakukan secara bersamaan. Salah satu cara mengatasi data yang besar adalah clustering. Pengelompokkan data bisa dilakukan berdasarkan hari pengambilan data atau dengan mengelompokkan berdasarkan jenis obyek atau pengelompokan yang lain.
2. Penyatuan Ruas Atas dan Bawah
Penyatuan ini terjadi karena scan dilakukan di jalur atas dan bawah tol secara bersamaan. Untuk menggabungkan hasil data mentah ini perlu digunakan referensi yang sama. Kami menggunakan pick point terhadap satu obyek yang tercapture scan dari atas jalan tol maupun dari bawah jalan tol.
3. Penghalang obyek (Object Barrier)
Pengambilan data dilakukan saat jalan tol tetap beroperasi. Hal ini mengakibatkan adanya halangan terhadap obyek yang discan. Lalu lintas kendaraan mengakibatkan beberapa obyek terhalang, karena pada saat perekaman pointcloud kendaraan melintas. Halangan ini mengakibatkan target dan sphere tidak terlihat atau terhalang. Proses yang dilakukan adalah mengambil point registrasi dari obyek yang sama terlihat dari 2 posisi berdiri alat.
4. Kapasitas Data yang besar
Dengan resolusi scan 1/2 menyebabkan kapasitas data besar dan berat saat processing. Langkah yang diambil dalam mengatasi hal tersebut yaitu dengan membagi area per segmen. Untuk setiap segmen terdiri dari 130-150 data scan. Dimana setiap segmen sudah diregistrasi untuk setiap ruas A-B dan atas-bawah.
5. Hasil Registrasi Tidak Match
Setelah registrasi berhasil dilakukan tetapi memiliki error yang tinggi akan menyebabkan data scan tidak match. Hal tersebut dapat diatasi dengan melakukan pengelompokkan/clustering untuk data yang bermasalah. Data dapat diperbaiki secara efisien dengan membagi menjadi ruas-ruas.
Registrasi point cloud merupakan tahap setelah melakukan proses 3D scanning. Pengolahan data hasil laser scan dijadikan satu kesatuan menjadi satu sistem yang utuh. Adapun sistem koordinat yang dilakukan pada kasus Akses Tanjung Priok (ATP) menggunakan koordinat gobal. Dari beberapa metode registrasi yang ada, dalam kasus ini menggunakan metode target-based.
Prosedur Pengerjaan Registrasi
Adapun prosedur pengerjaan registrasi yang dilakukan pada hasil laser scan Akses Tanjung Priok sebagai berikut:
Impor Data Scan
Data hasil laser scan diimport ke dalam software registrasi untuk dilakukan proses pengolahan data lebih lanjut. Format file berupa .fls.
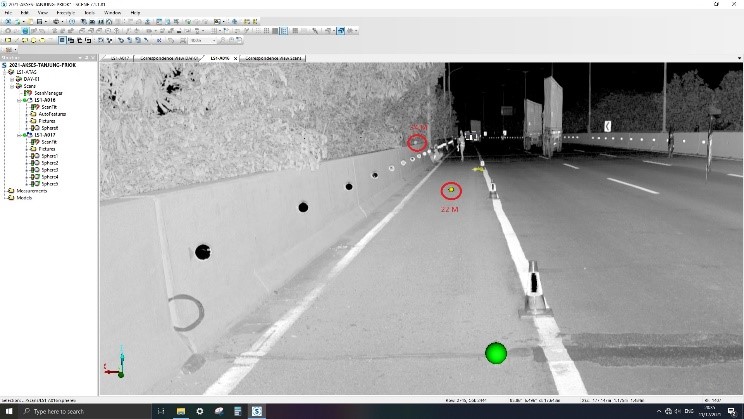
Pick Target
Sphere dan checkerboard sebagai target di-pick. Hal tersebut berfungsi sebagai stitch antar data agar setiap data saling terhubung.
Gambar 1. Pick checkerboard
Gambar 2. Pick Plane object
Gambar 3. Pick Sphere Target
Control Point
Memasukkan control point sebagai sistem koordinat global. Control point juga berlaku sebagai reference yang mana orientasi dan rotasi dari hasil registrasi mengikuti sudut dan koordinat dari control point ini.
Place Scan
Place scan merupakan tahap registrasi untuk menyatukan data-data hasil laser scan dengan parameter yang sudah disediakan di Faro Scene (software registrasi kami).
Check Correspondence
Pada tahap ini, pengecekan dilakukan untuk memastikan bahwa setiap data scan sudah terhubung. Serta memastikan bahwa koordinat dan orientasi data sudah mendekati sama.
Apply Picture dan Ekspor
Tahap terakhir apabila registrasi sudah baik yaitu melakukan coloring. Setelah pewarnaan data, selanjutnya data dieskpor ke format E57 untuk dilakukan modelling.
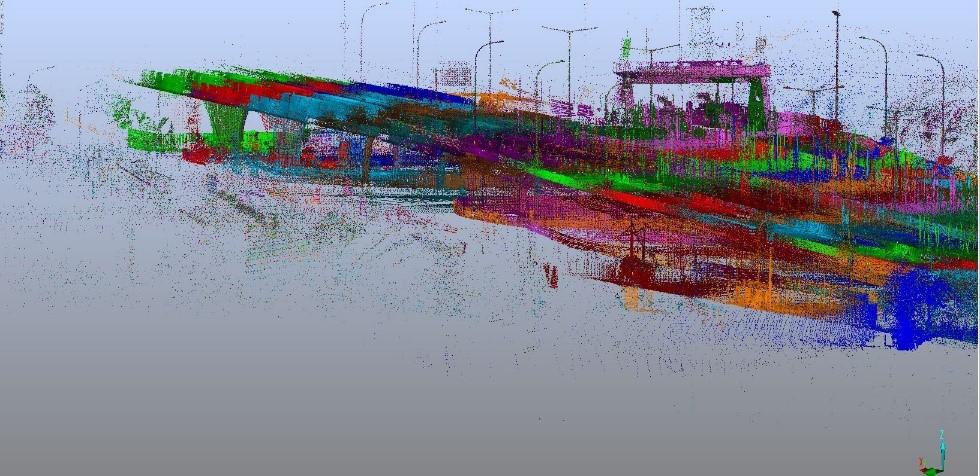
Hasil dari registrasi ini merupakan kumpulan dari beberapa station berdiri alat. Hasil registrasi ini merupakan pointcloud yang sudah siap dilakukan modeling.
Gambar 4. Hasil Registrasi secara isometrik
Untuk kendala dan cara mengatasi kendala dalam proses registrasi akan kami muat di artikel berikutnya…stay tuned guys…
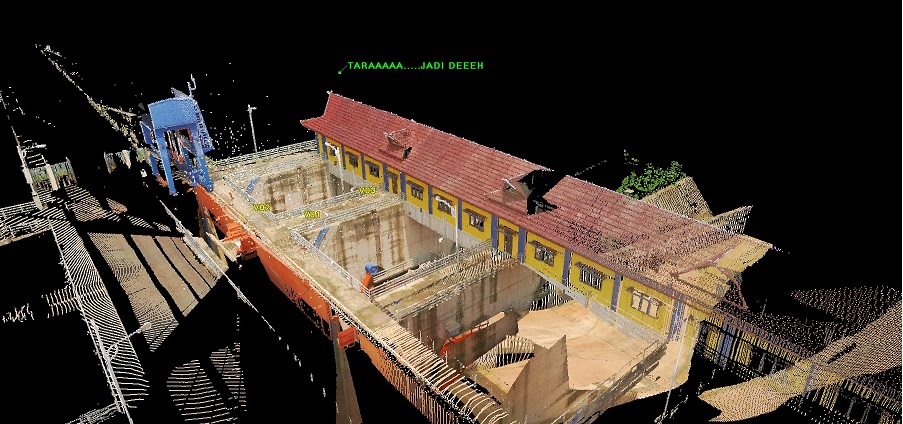
Building information modeling (BIM) adalah sarana untuk menciptakan representasi digital yang terdiri dari suatu asset dan informasi baik itu bangunan atau infrastruktur. BIM banyak diterapkan untuk bangunan maupun infrastruktur yang telah berdiri maupun yang akan dibangun. BIM juga memiliki tingkat kedetailan atau level of detail (LoD) yang perlu diperhatikan dalam proses pemodelannya. Fungsi penerapan berbeda-beda namun pada dasarnya memiliki tujuan yang sama. Pada artikel ini kita akan membahas mengenai proyek yang berhasil kami buat mengenai pembuatan BIM dari pemodelan 3D as-build model pada gedung bertingkat (Gambar 1).
Gambar 1. Hasil 3D as-build model gedung bertingkat
BIM mendorong semua pihak untuk bekerja secara kolaboratif
Eastman dkk. (2011) membagi fungsi BIM berdasarkan beberapa kelompok berdasarkan pemangku kepentingannya :
Pemilik : menilai opsi desain dari perspektif biaya, waktu, keberlanjutan, pengoperasian fasilitasnya dan manajemen aset berdasarkan model as-built.
Arsitek dan insinyur : perencanaan ruang dan ketepatan pembanguann, analisis energi, komunikasi/peninjauan desain (visualisasi 3D), pertimbangan dalam kuantitas dan estimasi biaya, desain dan analisis/simulasi sistem bangunan (struktur,sistem penanganan mekanik dan udara, sistem darurat, pencahayaan, akustik,dll.), koordinasi desain (clash detection), dan lain sebagainya.
Kontraktor : perencanaan dan penjadwalan konstruksi, biaya dan kontrol jadwal, pembelian dan pelacakan pengadaan, dan manajemen keselamatan.
Subkontraktor : proses manufaktur, pra-perakitan, dan prefabrikasi.
Secara garis besar pemodelan BIM mendorong semua pihak proyek untuk bekerja secara kolaboratif, membantu efisiensi proyek, mengurangi risiko model dan biaya proyek, dan memungkinkan penggunaan model untuk menginformasikan pengambilan keputusan operasi dan pemeliharaan di masa depan.
Cara pengambilan data point cloud
Pembuatan BIM dapat dilakukan dengan beberapa metode salah satunya dengan dengan pemodelan melalui as-build model. As-build model merupakan pemodelan yang dilakukan dengan menggunakan suatu data yang menjadi acuan pemodelannya. Acuan tersebut bisa dengan 2D drawing, maupun yang akan dibahas pada artikel ini yaitu menggunakan alat survei 3D Laser Scan.
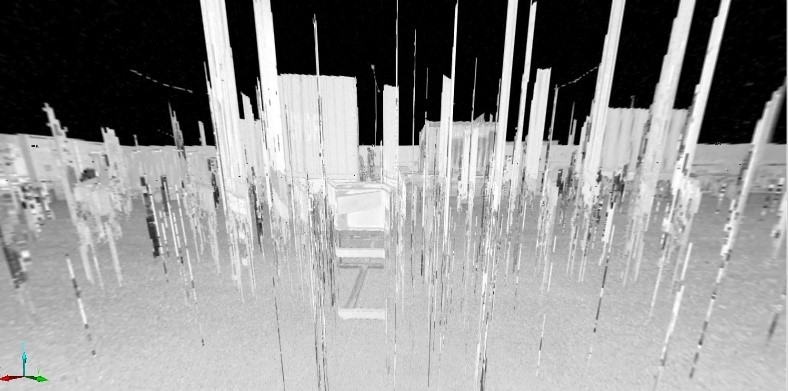
Gambar 2. Point cloud Gedung hasil pindaian 3D Laser Scan
3D Laser Scanner adalah alat survei untuk pengambilan data geometri dari suatu objek atau lingkungan dengan memanfaatkan teknologi sinar laser yang disebarkan ke segala arah. Proses pengambilan data point cloud dilakukan secara bertahap mengikuti area yang ingin dipindai. Pada area tersebut harus dipasang penanda berupa checker board atau sphere untuk mempermudah proses identifikasi titik scan pada saat proses registrasi. Setelah semua area sudah dipindai barulah masuk ke proses pertama pengolahan yaitu registrasi. Registrasi adalah proses penyatuan semua titik scan. Hasilnya berupa kumpulan jutaan titik yang memiliki nilai koordinat, warna, intensitas, dan membentuk objek/lingkungan secara 3 Dimensi yang merupakan representasi dari objek atau lingkungan sebenarnya (Gambar 2).
Ekstraksi pointcloud menjadi 3D as-build model
Pedoman pembuatan 3D as-build model didasarkan pada ekstraksi informasi geometris yang dimiliki oleh point cloud. Proses akuisisi data point cloud seperti yang dijelaskan pada bagian sebelumnya menggunakan teknologi 3D Laser Scan. 3D Laser Scan menggambil data Gedung secara keseluruhan sehingga menghasilkan point cloud yang merepresentasikan Gedung tersebut. Pengambilan data dilakukan oleh PT. Zona Spasial dengan tenaga ahli dan sudah berpengalaman dalam proses akusisi data. Tingkat kerapatan point cloud disesuaikan berdasarkan permintaan client dan keluaran model yang ingin dihasilkan.
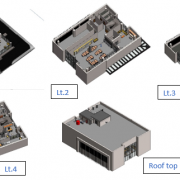
Pemodelan BIM yang dilakukan pada artikel ini adalah pemodelan Gedung 5 lantai yang terdiri dari Ground Floor, Lantai 2, Lantai 3, Lantai 4, dan Roof Top (Gambar 3). Sama halnya dengan akusisi data, proses pemodelan 3D as-build juga dilakukan PT. Zona Spasial dengan tenaga ahli yang professional dan sudah berpengalaman.
Gambar 3. Hasil 3D as-build model Gedung per-lantai
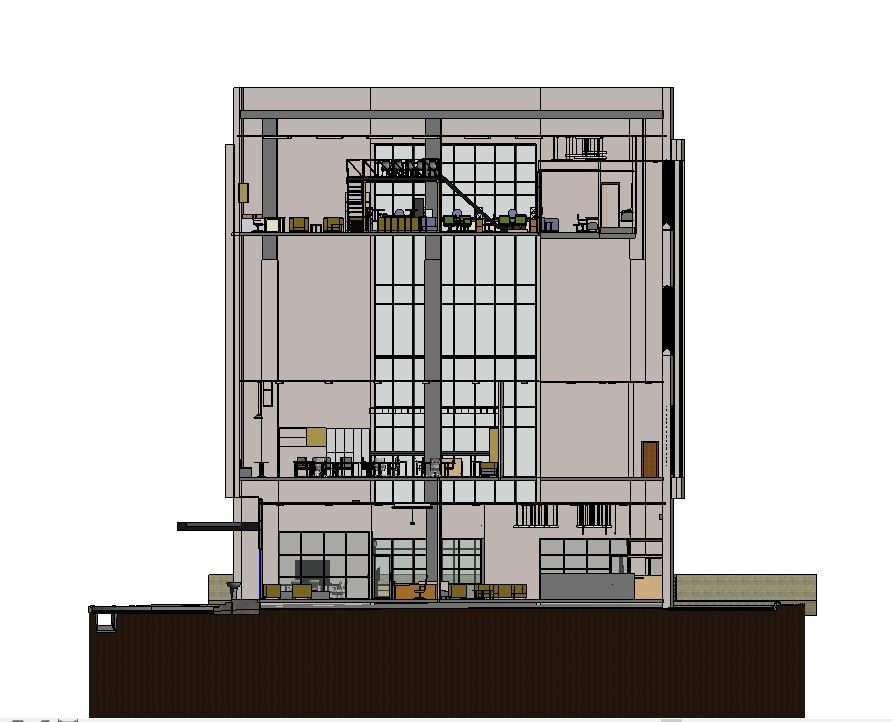
Gambar 4. Hasil 3D as-build model Gedung nampak samping
Hasil pemodelan 3D as-build menampilkan gambaran bangunan perlantai baik eksterior maupun interiornya (Gambar 4). Hasil tersebut dapat dimanfaatkan oleh client lebih lanjut dalam BIM seperti menambahkan informasi masing-masing ruangan atau pendataan barang-barang inventaris Gedung. Hasil dapat dimanfaatkan juga untuk turunan BIM lainnya seperti untuk simulasi kebakaran, jalur evakuasi, saraba marketing dan lain sebagainya.
Kesimpulan
Building information modeling (BIM) merupakan representasi digital yang terdiri dari suatu asset dan informasi baik itu bangunan atau infrastruktur. BIM memiliki manfaat dalam membantu efisiensi proyek, mengurangi risiko model dan biaya proyek, dan memungkinkan penggunaan model untuk mengambil keputusan di masa depan. Pembuatan BIM dapat dilakukan dengan beberapa metode salah satunya dengan dengan pemodelan melalui as-build model. As-build pada artikel ini dihasilkan dari hasil pemindaian point cloud menggunakan teknologi 3D Laser Scan. Proses pemodealan dibuat oleh PT.Zona Spasial dengan tenaga yang professional dan berpengalaman sehingga menghasilakn bangunan 3D yang diharapkan client untuk pemanfaatan BIM.
Penggunaan 3D laser scan untuk melakukan survey bagi dunia perkapalan sudah lama terjadi. Kecepatan dalam pengambilan data dan ketelitian dalam penggambaran adalah alasan utama penggunaan laser scan dan 3D model tersebut. Hasil akhir dari survei 3D Laser Scan tersebut dapat dimanfaatkan untuk navigasi kapal, retrofit, refurbishment, renovation maupun asuransi.
Model 3D kapal untuk As Built
Salah satu kegunaan as built kapal adalah untuk mengetahui ukuran dan bentuk sebenarnya dari kapal tersebut, sehingga jika dilakukan perubahan maupun perbaikan maka marine engineers dapat menyesuaikan. 3D laser scan mampu bekerja optimal untuk memberikan model yang akurat. Akurasi ini penting bagi maintenance karena perbaikan harus sesuai/tepat dengan ukuran yang diberikan.
Gambar 1. As Built Kapal
As built ini juga dapat dimanfaatkan untuk kebutuhan lain, misalnya marketing. Calon penyewa kapal akan dimudahkan dalam inspeksi sebelum melakukan transaksi penyewaan. Gambar 3D yang aktual dan presisi mampu disajikan dari hasil modeling 3D laser scan.
Retrofit, Refurbishment & Structural Alteration
Marine engineer dapat melakukan perubahan pada sebuah kapal. Baik itu perubahan fungsi maupun perubahan area pada kapal. Perubahan ini memerlukan gambar sebelum dan sesudah secara detail dan akurat. 3D laser scan dapat membantu dalam mendapatkan gambaran akurat dari sebuah kapal maupun bagian-bagian dalam kapal.
Gambar 2. Hull, propeller dan struktur dalam kapal
Setelah mendapatkan gambar dan ukuran yang sesuai dengan sebenarnya, maka marine engineer akan membuat rencana kerja dan melakukan perubahan tersebut. Setelah selesai maka perlu dilakukan survei 3D Laser scan kembali untuk mendapatkan gambaran setelah dilakukan perubahan dan as built bagi maintenance.
Dalam artikel ini yang akan dibahas tentang 3D Inspectiontank dengan menggunakan data pointcloud dari Laser Scan. Penggunaan inspeksi 3D untuk tangki ini merupakan bagian dari maintenance yang disyaratkan.
Laser Scan untuk mendapatkan 3D Model Tangki
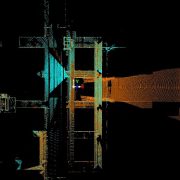
Peruntukan laser scan dalam analisis tangki adalah untuk mendapatkan pointcloud dari tangka yang akan diinspeksi. Laser scan survei harus mampu men-capture seluruh bagian dari tangki, sehingga akan memudahkan dalam pembentukan model 3 dimensi. Proses selanjutnya, tentu saja adalah registrasi dari hasil scan (https://zonaspasial.com/2019/10/registrasi-point-cloud-terrestrial-laser-scan-dan-cara-melakukannya-dengan-benar/). Setelah terbentuk pointcloud yang benar dari registrasi maka dapat dilakukan proses selanjutnya yanitu cleaning. Cleaning ini untuk membuang/menghapus obyek-obyek di luar tangki yang akan dimodelkan. Proses ini untuk memudahkan modeler dalam membangun obyek 3 Dimensi.
Gambar1. Tank Pointcloud
Setelah pointcloud dibersihkan dari obyek yang tidak diperlukan, maka proses selanjutnya adalah membuat mesh modeling atau model permukaan tangki. Model permukaan ini yang akan membentuk tangka seperti keadaan sebenarnya.
Bentuk tangka yang seperti aslinya (as is) akan digunakan sebagai baseanalisys. Permukaan yang terlihat secara visual (pandangan mata) seringkali berbeda dengan yang didapatkan dari hasil mesh modeling ini. Lekukan-lekukan kecil tidak akan terlihat oleh mata manusia. Bahkan dalam gambar hasil mesh model, mata kita seringkali tidak menemukan lekukan yang terjadi oleh berbagai sebab. Untuk itulah analisis perlu dilakukan.
Gambar 2. Mesh Modeling Tangki
Analisis 3D Inspection
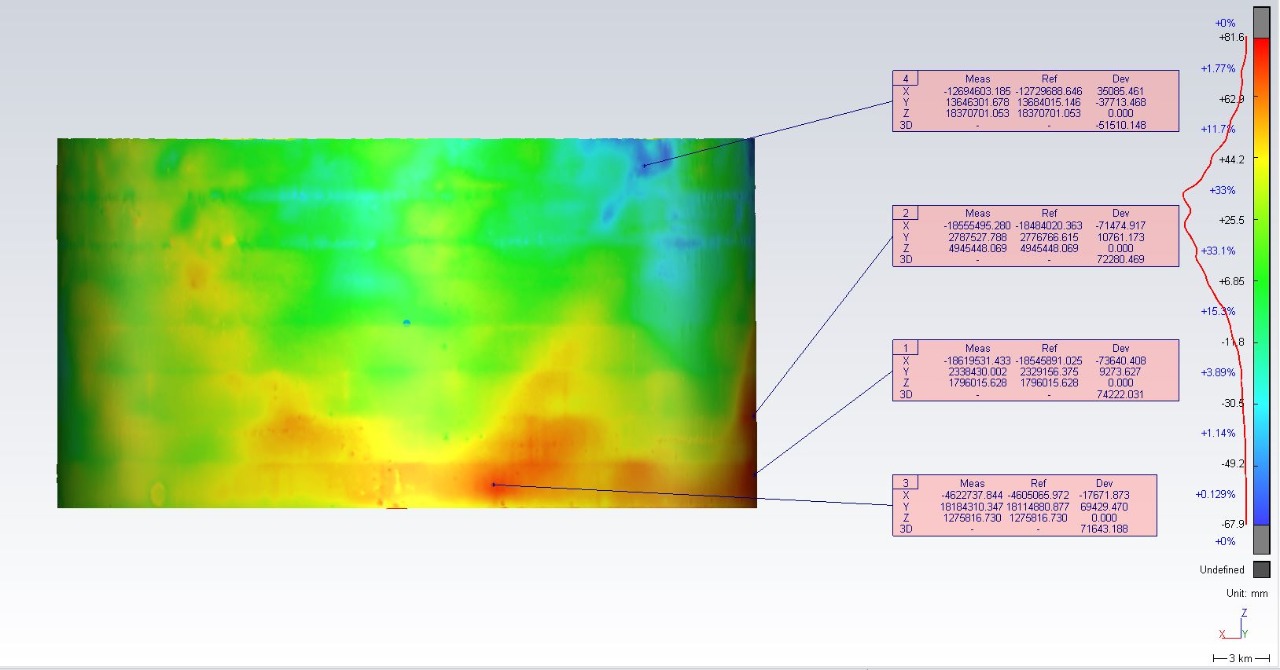
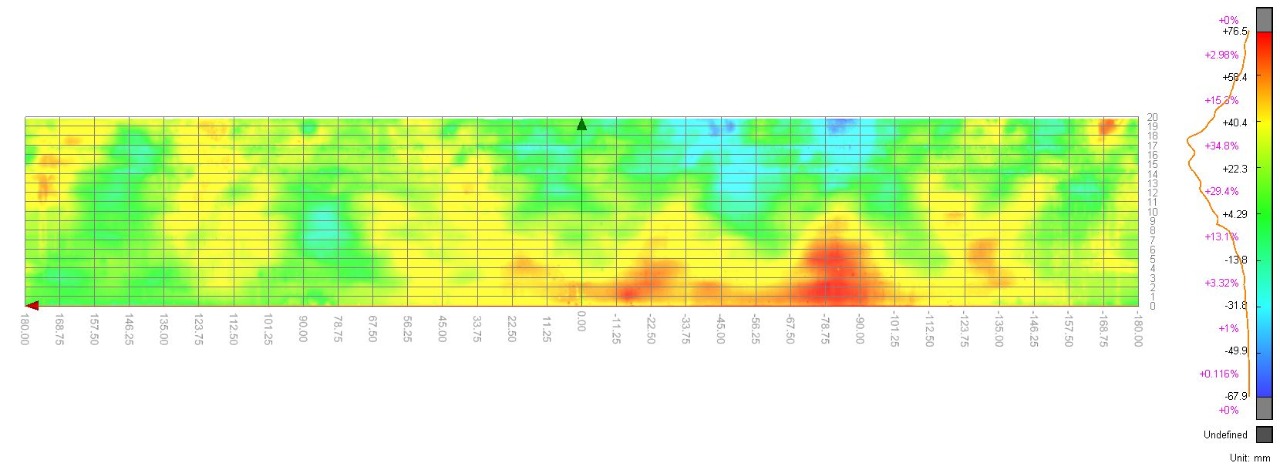
Setelah model permukaan (mesh model) terbentuk, maka proses 3D Inspection dapat dilakukan terhadap permukaan tangki. Analisa ini akan membentuk warna berbeda bagi setiap permukaan. Tentu saja harus ada rujukan yang pasti sehingga permukaan yang melengkung dapat teridentifikasi.
Permukaan melengkung ini dapat berupa lengkungan ke dalam maupun lengkungan ke luar. Perbedaan warna dari permukaan menunjukkan kelengkungan permukaan yang dianalisa.
Gambar 3. 3D Inspection
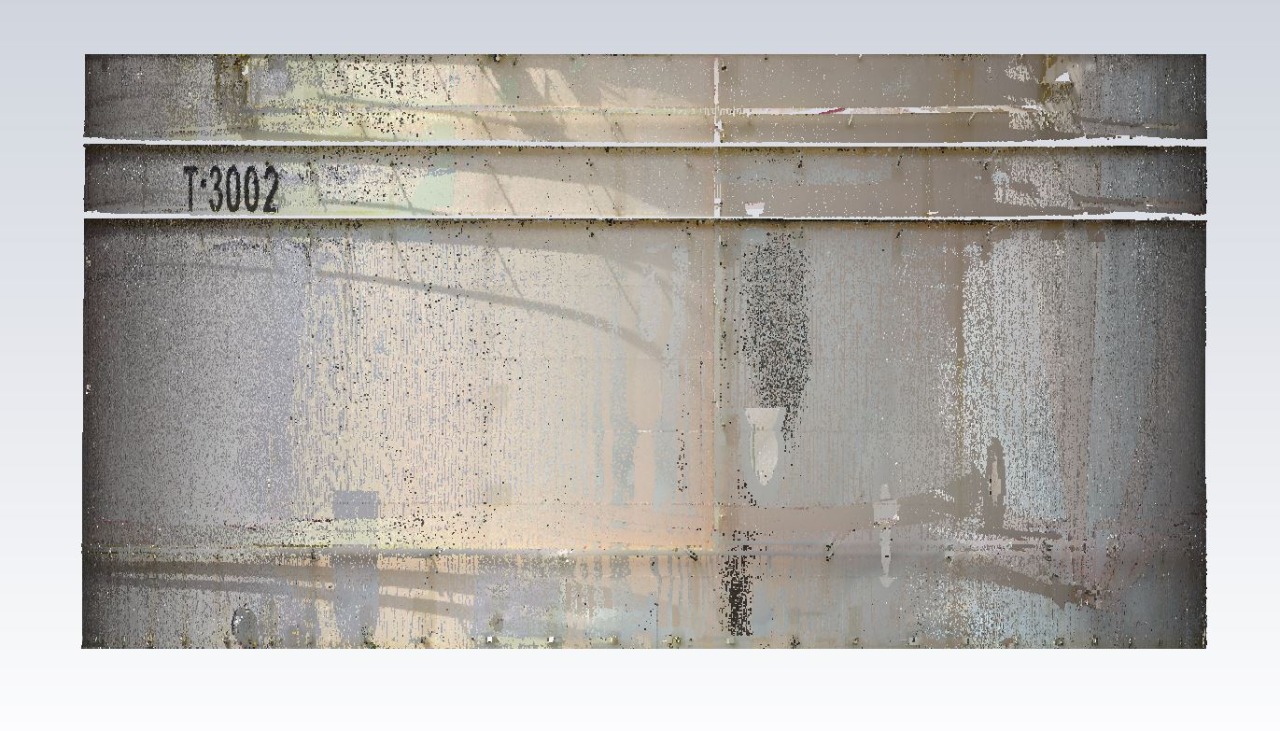
Selain 3D Inspection, analisis bisa ditambahkan dengan membentangkan permukaan menjadi color map. Dengan membentangkan permukaan tangki maka akan lebih mudah secara visual dilakukan Analisa.
PT Zona Spasial seringkali mengadakan pelatihan untuk survei dan pemetaan. Pelatihan ini meliputi pelatihan pemetaan dengan drone, pelatihan survei dengan laser scan maupun pelatihan untuk survei bathimetri (akan segera hadir). Hal ini disesuaikan dengan bidang bisnis yang ada di PT Zona Spasial. Pelatihan ini ada yang bersifat internal maupun eksternal.
Pelatihan internal tentu saja untuk mengembangkan kapabilitas dari staf PT Zona Spasial. Untuk staf baru, tentu saja, pelatihan ini mandatory. Kemampuan staf baru harus disesuaikan dengan kebutuhan yang ada pada perusahaan. Sedangkan untuk staf lama, pelatihan ini untuk mengembangkan keahlian pada bidangnya maupun mempelajari lebih mendalam tentang bidang yang digelutinya. Pelatihan internal bisa berupa pelatihan peralatan, perangkat lunak maupun manajemen.
Pelatihan eksternal, beberapa kali juga kami selenggarakan. Pelatihan eksternal ini biasanya dilakukan dengan memberikan materi dasar pemetaan dengan drone/UAV, Laser Scan dan 3D Modeling serta pelatihan survei batimetri. Pelatihan ini ditujukan untuk peserta di luar staf PT Zona Spasial.
Sumber daya Manusia
Ketersediaan sumber daya manusia yang mempunyai kapabilitas yang sesuai dengan kebutuhan perusahaan merupakan permasalahan yang ada sejak dulu. Keluar-masuknya personil dalam suatu perusahaan kadang menjadi masalah jika ada keterbatasan sumber daya. Apalagi perusahaan konsultan yang mengandalkan manusia sebagai aset terbesarnya.
Mengatasi hal tersebut, maka pelatihan secara berkala merupakan salah satu solusi, sehingga terjadi kesinambungan pengetahuan dan tidak ada “jomplang” skill yang dimiliki. Pelatihan eksternal juga membantu menyelesaikan masalah jika suatu saat perusahaan membutuhkan tenaga kerja yang terlatih pada waktu tertentu. Ketersediaan pasar tenaga kerja yang mumpuni (sesuai dengan bidangnya) akan sangat membantu dalam proses rekrutmen.
Sumber daya manusia yang terlatih dan mumpuni hanya bisa dicapai dengan pelatihan yang berkesinambungan. Pengetahuan tentang hardware, software serta manajemen terbaru harus selalu ditingkatkan. Dengan demikian maka masalah ketersediaan sumber daya manusia dapat teratasi.
Point cloud hasil terrestrial laser scan merupakan informasi spasial yang masih perlu dilakukan pengolahan lebih lanjut. Proses selanjutnya adalah melakukan penyatuan seluruh point cloud yang terpisah-pisah berdasarkan pengambilan data.
Registrasi point cloud ke dalam satu sistem yang sama adalah awal pada pengolahan data hasil laser scan. Sistem yang digunakan bisa dengan sistem lokal maupun dengan sistem global. Registrasi ini akan membuat seluruh point cloud berkorelasi dan menyatu dalam satu sistem yang sama.
Langkah registrasi ini memiliki dampak terhadap akurasi data yang akan digunakan, serta berdampak terhadap proses selanjutnya pada pengolahan point cloud menjadi model 3 dimensi.
Beberapa hal teknis yang perlu diperhatikan saat melakukan registrasi point cloud berdasarkan pengalaman yang kami miliki adalah sebagai berikut:
Lakukan Registrasi hasil TLS satu persatu berurutan sesuai perpindahan alat
Registrasi berurutan akan memudahkan dalam mengenali kesalahan, serta akan memudahkan dalam manejemen data. Setiap hasil scan akan dikenali dan jika terjadi kesalahan akan mudah dalam melakukan perbaikan.
Pastikan korelasi antar scan pada target memiliki error yang kecil.
Korelasi antar scan ini mempengaruhi point cloud secara keseluruhan. Error akan mempengaruhi setiap point.
Jika ditemukan hasil registrasi yang buruk buanglah korelasi target yang memiliki error terbesar
Korelasi target yang besar berpengaruh terhadap akumulasi error pada registrasi. Sehingga jika korelasi target yang error nya besar dibuang, maka error akan berkurang. Tetapi perlu diperhatikan bahwa target harus mempunyai ukuran lebih sehingga saat registrasi tidak kekurangan target yang akan dikorelasikan. Kami bahas masalah target pada tulisan sebelumnya.
Fix-kan scan yang sudah teregistrasi dengan baik agar tidak berubah
Sebaiknya scan-scan yang sudah terigistrasi dengan baik di fix-kan supaya tidak terpengaruh oleh registrasi scan yang selanjutnya.
Jika melibatkan scan yang banyak, buatlah grup/cluster registrasi
Kadang scan yang dilakukan bisa memuat banyak sekali tempat berdiri alat. Untuk manajemen data yang baik, lakukan grouping/cluster. Dengan grouping/cluster maka akan mudah dalam mengelola data pointcloud hasil laser scan. Selain grouping/cluster, lakukan juga UNLOAD/HIDDEN(bukan DELETE) pada scan yang sudah teregistrasi dengan baik untuk scan yang berjumlah banyak.
Demikian beberapa hal yang bisa dilakukan dalam registrasi hasil scan. Mungkin masih ada beberapa trik lain yang bisa ditambahkan untuk mempermudah pekerjaan registrasi hasil terrestrial laser scan.
Asset management adalah suatu proses sistematis yang bertujuan untuk mempertahankan, membaharukan, dan mengoperasikan aset secara hemat melalui akuisisi, penciptaan, operasi, pemeliharaan, rehabilitasi, dan penghapusan aset sehingga tujuan dapat tercapai secara efektif dan efisien.
Dengan bantuan teknologi laser scan dan 3D Modeling, manajemen aset dapat dilakukan dengan lebih baik. Kemampuan laser scan dalam mengcapture obyek secara teliti serta 3D model yang dilakukan secara detil akan membantu dalam proses manajemen aset. Manajemen aset untuk obyek-obyek vital akan teroganisir dan sangat membantu dalam pengambilan keputusan.
Laser scan dengan ketelitian sampai dengan 2 mm dan 3D model dengan ketelitian sampai dengan 5 mm akan menggambarkan obyek-obyek vital untuk kepentingan operasi dan pemeliharaan. Secara berkala, updating terhadap obyek-obyek dalam lingkup manajemen aset perlu diperbarui, sehingga memudahkan dalam daily operation & maintenance.
Dalam
industri kadang dibutuhkan pembuatan ulang suatu barang yang
kebutuhannya bersifat unik dan mempunyai ukuran tersendiri. Pembuatan
kembali (refabrikasi) terhadap suatu barang membutuhkan ukuran detil
barang tersebut. Jika tersedia gambar rencana maka hal tersebut dapat
dilakukan segera, tetapi jika tidak tersedia maka perlu dilakukan
poembuatan as built.
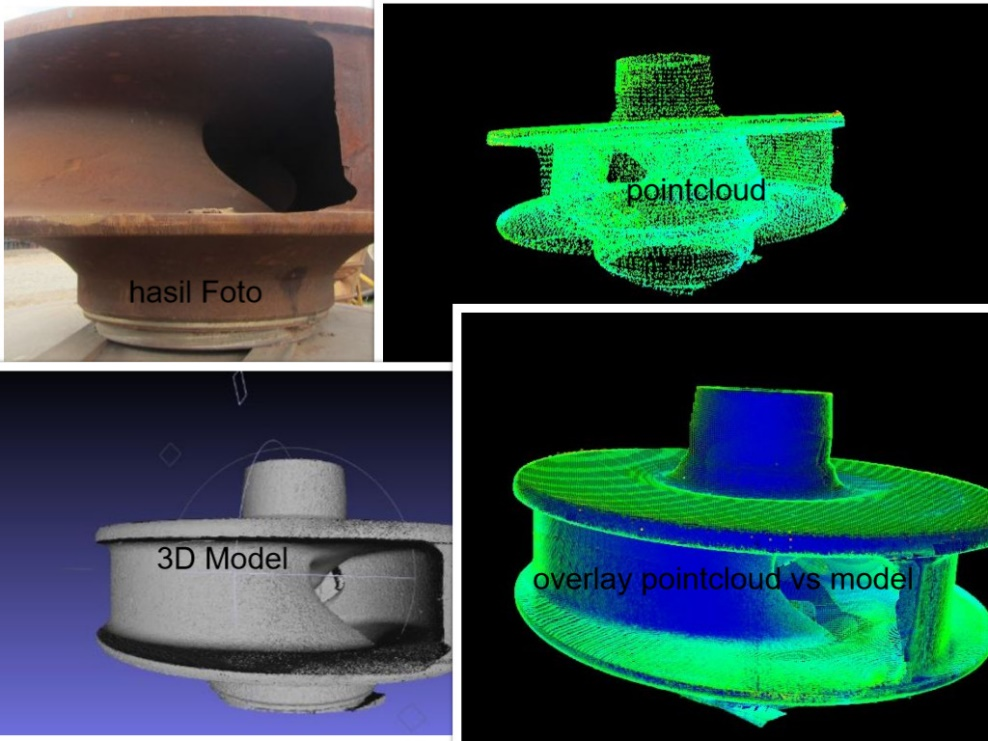
As built Drawing yang sesuai dengan ukuran sebenarnya membutuhkan pengukuran yang detil. Laser scan yang dilanjutkan dengan pembuatan 3D Model akan membantu dalam pembuatan as built drawing. Selanjutnya as built tersebut dapat digunakan sebagai bahan melakukan refabrikasi.
Tahapan
dalam melakukan pengambilan data laser scan dan pengolahan 3D model:
Pengambilan data pointcloud dengan laser scan
Registrasi pointcloud dengan titik control (Sphere dan target)
Pembuatan model 3 dimensi (3D Model)
Pembuatan slicing gambar 2D untuk keperluan fabrikasi
Tahapan-tahapan
dalam melakukan laser scanning dan pembuatan 3D model ini dilakukan
dengan ketelitian yang maksimal. Ketelitian yang bisa didapat dari
Laser Scan maksimal 2mm, sedangkan ketelitian modeling 3D sekitar 2-4
mm.
Setelah
tahapan-tahapan dilakukan dan ketelitian yang diperoleh sesuai dengan
yang diharapkan maka, proses re-fabrikasi bisa dilaksanakan.