Registrasi point cloud merupakan tahap setelah melakukan proses 3D scanning. Pengolahan data hasil laser scan dijadikan satu kesatuan menjadi satu sistem yang utuh. Adapun sistem koordinat yang dilakukan pada kasus Akses Tanjung Priok (ATP) menggunakan koordinat gobal. Dari beberapa metode registrasi yang ada, dalam kasus ini menggunakan metode target-based.
Prosedur Pengerjaan Registrasi
Adapun prosedur pengerjaan registrasi yang dilakukan pada hasil laser scan Akses Tanjung Priok sebagai berikut:
Impor Data Scan
Data hasil laser scan diimport ke dalam software registrasi untuk dilakukan proses pengolahan data lebih lanjut. Format file berupa .fls.
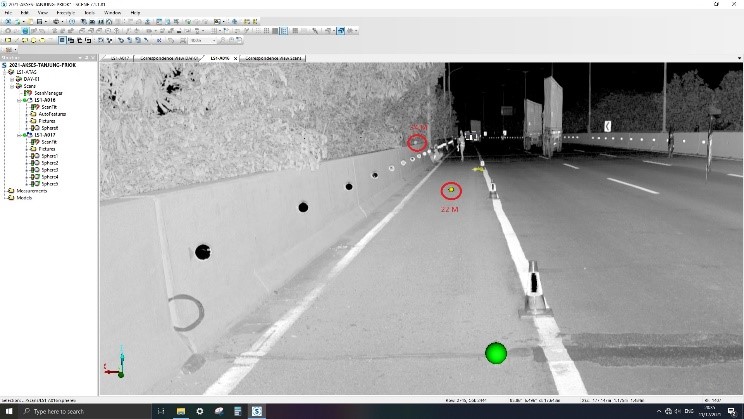
Pick Target
Sphere dan checkerboard sebagai target di-pick. Hal tersebut berfungsi sebagai stitch antar data agar setiap data saling terhubung.
Gambar 1. Pick checkerboard
Gambar 2. Pick Plane object
Gambar 3. Pick Sphere Target
Control Point
Memasukkan control point sebagai sistem koordinat global. Control point juga berlaku sebagai reference yang mana orientasi dan rotasi dari hasil registrasi mengikuti sudut dan koordinat dari control point ini.
Place Scan
Place scan merupakan tahap registrasi untuk menyatukan data-data hasil laser scan dengan parameter yang sudah disediakan di Faro Scene (software registrasi kami).
Check Correspondence
Pada tahap ini, pengecekan dilakukan untuk memastikan bahwa setiap data scan sudah terhubung. Serta memastikan bahwa koordinat dan orientasi data sudah mendekati sama.
Apply Picture dan Ekspor
Tahap terakhir apabila registrasi sudah baik yaitu melakukan coloring. Setelah pewarnaan data, selanjutnya data dieskpor ke format E57 untuk dilakukan modelling.
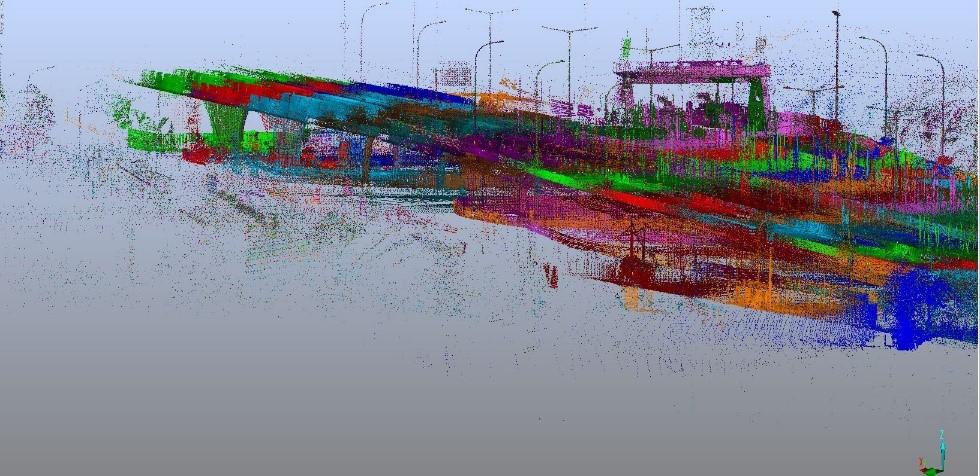
Hasil dari registrasi ini merupakan kumpulan dari beberapa station berdiri alat. Hasil registrasi ini merupakan pointcloud yang sudah siap dilakukan modeling.
Gambar 4. Hasil Registrasi secara isometrik
Untuk kendala dan cara mengatasi kendala dalam proses registrasi akan kami muat di artikel berikutnya…stay tuned guys…
Survei dengan menggunakan Terrestrial Laser Scan (TLS) saat ini sudah mulai banyak dilakukan. Selain keunggulan dalam hal capture data yang masif, juga survei ini sangat mudah dilakukan. Laser scan yang menghasilkan point cloud saat ini sudah diakui sebagai salah satu tool untuk menyajikan data spasial.
Berbicara tentang data spasial, tentu saja diperlukan presisi dan akurasi. Presisi dan akurasi tentu saja merujuk pada penggunaan data tersebut nantinya. Jika data akan digunakan untuk, misalkan DED tentu saja akurasi yang diminta akan tinggi. Demikian juga jika data spasial akan digunakan sebagai masukan dalam Dimensional Control (DC).
Terrestrial Laser Scan
Beberapa hal yang perlu diperhatikan saat melakukan survei dengan TLS sehingga didapatkan hasil yang bagus adalah sebagai berikut:
Jarak obyek yang akan discan dengan TLS.
Hal ini akan mempengaruhi banyaknya point cloud yang dihasilkan. Semakin banyak akan semakin akurat. Selain itu juga adanya pembelokan cahaya, semakin jauh target maka cahaya laser akan semakin terbelokkan.
Sebaran target (baik sphere maupun checker board).
Sebaran target yang baik harus merata pada hasil point cloud. Posisi target diusahakan merata terhadap posisi TLS (atas-bawah, kiri-kanan, depan-belakang)
Checkerboard dan Sphere
Minimal terdapat 5 Target yang tescan dari satu posisi berdiri alat TLS.
Pada software registrasi biasanya menetapkan minimal 3 atau 4 buah target yang terdeteksi. Ukuran lebih pada pengambilan posisi target akan menambah keakuratan hasil, serta jika salah satu target rusak (tidak dapat diregistrasikan) maka masih ada target lain yang menggantikan.
Kurangi kumulatif error
Untuk mengurangi kumulatif error pada saat registrasi, maka target diusahakan terlihat dari 2 posisi TLS atau lebih. Sehingga dapat diregistrasikan dengan baik dan kumulatif error akan berkurang. Selain hal itu, untuk mengurangi kumulatif error juga usahakan jalur survei TLS merupakan polygon tertutup, sehingga target pertama akan terikat dengan posisi target terakhir.
Sphere terlihat di atas
Aturan checkerboard
Jika target menggunakan checkerboard, maka harus diletakkan pada permukaan yang rata. Permukaan checkerboard juga harus menghadap tegak lurus ke posisi lensa pada TLS. Jika dimungkinkan, maka penambahan pengukuran posisi checkerboard dengan TS (Total Station), sehingga hasil registrasi akan semakin akurat dan kumulatif error berkurang.
3D Laser scan atau Pemindaian laser 3 Dimensi menggunakan
teknologi berbasis LIDAR untuk secara akurat dan efisien menangkap data 3
dimensi dalam berbagai pengaturan, terlepas dari ukuran dan fitur permukaan. 3D
Laser Scan dapat digunakan tanpa menyentuh secara fisik objek apa yang sedang
diukur. pemindaian laser menciptakan catatan digital yang jelas dan akurat dari
kondisi yang ada (as-built). Pemindaian menghasilkan jutaan titik pengukuran
yang disebut “koordinat.” Bersama-sama titik membuat data mentah
dalam bentuk “point cloud.” Setiap koordinat dalam point cloud berisi
nilai x, y, dan z, yang juga dikenal sebagai (Northing (y), Easting (x), dan
Elevation (z)). Dari detail titik-titik ini, kita bisa mendapatkan pengukuran
yang tepat dari satu titik point cloud ke titik lainnya.
Apa fungsi 3D Laser Scan?
terestrial laser scan
3D Laser Scan dapat digunakan untuk menangkap informasi dan
data dari objek untuk digunakan sebagai analisis teknis dan pemodelan ulang.
Penggunaan umum laser scan ini adalah:
As-built survey, memotret realitas atau survei
kondisi yang ada
Verifikasi konstruksi, sortasi, dan simulasi
Design engineering untuk peningkatan atau
perluasan fasilitas
Prefabrikasi
Deteksi benturan / benjolan
Dokumentasi arsitektur atau pelestarian sejarah
Menghitung volume, analisis deformasi, dan biaya
overhead
Desain dan konstruksi virtual
Pemindaian laser untuk koordinasi fasilitas
Mengumpulkan data geospasial
Keunggulan dari laser scan
proses akusisi data laser scan
Cepat. Laser scan dapat menangkap hingga jutaan titik data 3D per detik, memberikan detail yang sangat akurat dan kaya dari setiap aspek proyek Anda.
Akurat. Pengukuran yang diperoleh dengan pita pengukur atau handheld GPS dapat mengalami kesalahan. Pemindaian laser adalah bentuk pengukuran paling akurat yang ada, memberikan akurasi skala milimeter atau kurang.
Menjawab kebutuhan survey. Berapa kali Anda meninggalkan lokasi kerja dengan menyisakan beberapa pengukuran lagi? Pemindaian BIM 3D akan menangkap data tambahan, sehingga tidak perlu kembali ke proyek untuk mengambil data tambahan.
Keselamatan. Pemindaian 3D dapat memperoleh pengukuran di lokasi yang sulit dijangkau atau berbahaya sambil menjaga pekerja agar tidak berada di jalur yang berbahaya.
Bagaimana proses operasional laser scan? Secara umum langkah kerja yang dilakukan
adalah sebagai berikut :
Pre-Survey
Sebelum survey, tim akan
melakukan pekerjaan sebagai berikut :
Memastikan semua alat laser Scanner berfungsi normal dan
lengkap dengan segala asesorisnya.
Memastikan semua battery dalam kondisi penuh siap
digunakan.
Memastikan PC dan semua software yang dibutuhkan siap
digunakan.
Membuat perencanaan survey.
Sebagai tambahan tim survey juga
akan melakukan observasi lingkungan sebagai berikut :
Memastikan akses kerja
Memeriksa area ber-vibrasi tinggi
Memeriksa tingkat kebisingan
Memeriksa hambatan
pada suhu
tinggi
Area potensi berbahaya
Kondisi pencahayaan
Hal lain yang akan mengganggu aktivitas survey
Survey
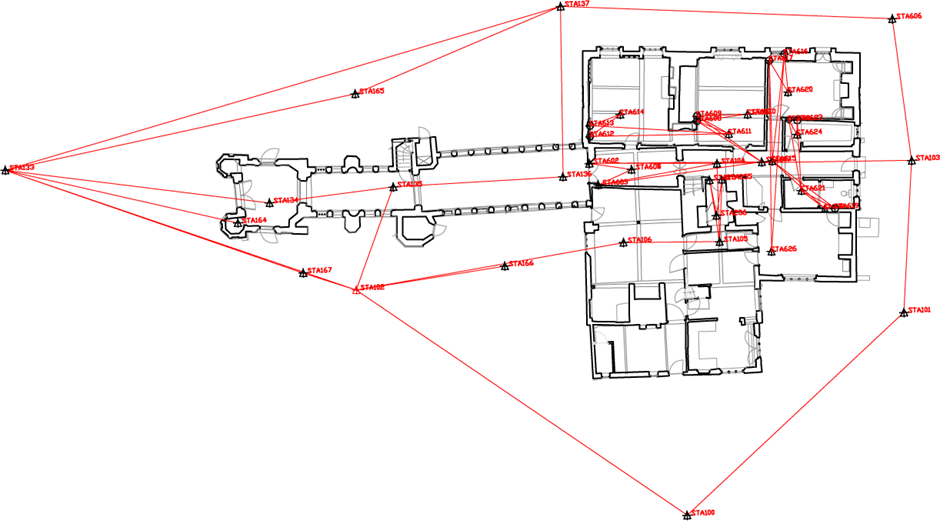
Control
Tim survey akan
menetapkan titik kontrol di sekitar area pekerjaan dengan menggunakan metoda
traverse. Pengukuran akan menggunakan alat Total Station. Titik kontrol ini
akan terikat ke titik kontrol utama (BM) yang sudah ada di lokasi atau yang di
tentukan client. Titik-titik kontrol tersebut akan ditandai dengan Checkerboard
yang selanjutnya akan berfungsi sebagai target pengikatan antar posisi Laser
Scan.
skema transverse method
Akusisi Data
Secara umum proses survey
Laser Scanning akan memakan waktu sekitar 10 menit untuk satu posisi scan, dengan resolusi sekitar 6 mm pada jarak 10m. Sebagai
pengikatan antan scan akan disebarkan target Sphere dan Checkerboard di sekitar
area pekerjaan.
3D Laser Scanner akan mengambil data pointcloud dan photo 360° horizontal dan 270° vertikal. Alat laser Scanner hanya bisa merekam objek yang terlihat, sementara untuk mendapatkan data
dari objek yang terhalang, alat harus berpindah tempat. Semua Checkerboard harus teregistrasi dengan
sistem koordinat. Minimal ada 4 target yang ter-scan sebagai target ikatan antar
scan.
target dan sphere untuk akusisi data
Data Processing
Processing akan dimulai dengan penggabungan semua posisi scan dengan target Sphere dan Checkerboard sebagai ikatan antar scan (registrasi). Setiap scan akan terikat dengan scan lainnya minimal pada 4 target dan semua target terikat pada titik kontrol. Aktivitas ini akan menggunakan software Faro Scene. Setelah semua scan terigistrasi dengan baik, selanjutnya akan di export ke software Cyclone untuk proses QC dan pembuatan model 3D.