
Prinsip Cara Kerja Sebuah UAV
Saat ini, perkembangan teknologi di bidang Unmanned Aerial Vehicle (UAV) semakin pesat. Sudah banyak sekali aplikasi pemanfaatan drone untuk membantu pekerjaan kita dalam berbagai hal, seperti saintis yang mengumpulkan data penelitian, engineer yang membuat teknologi terintegrasi seperti survey udara, pelacakan sebuah objek, dan lain lain. Tentunya, bagi seseorang yang ingin mengetahui maupun mengoperasikan sebuah UAV harus mengetahui dasar-dasar dari komponen minimum yang terdapat pada UAV.

Robotika –dalam hal ini UAV-, pasti selalu berkutat dengan komponen berupa sensor dan juga aktuator. Karena suatu UAV harus mengetahui lingkungan spasial yang mempengaruhi dirinya, dan untuk menafsirkannya menjadi pergerakan, maka dibutuhkan aktuator. UAV sederhana harus dapat melakukan autonomous seperti terbang, mengambang di udara, atau navigasi tanpa input dari pilot. Kemampuan untuk stabilisasi diri, dan mempertahankan posisi juga harus dapat dimiliki oleh suatu UAV. Lalu, dalam UAV, sensor dan aktuator apakah yang digunakan?
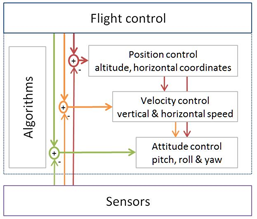
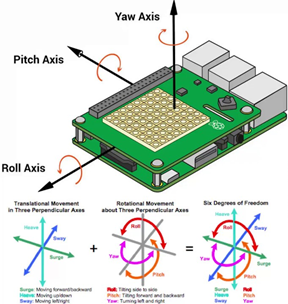
Sensor utama yang berfungsi sebagai kendali pada suatu UAV adalah sensor IMU (Inertial Measurement Unit), yang terdiri dari accelerometer, gyroscopes, dan juga dapat memiliki kompas (magnetometer). Sensor ini akan memberi informasi kepada UAV tentang keadaan dari UAV terhadap lingkungan eksternal seperti percepatan pada tiap sumbu termasuk percepatan akibat gravitasi, lalu informasi tentang orientasi dan kecepatan angular dari wahana, dna jika terdapat kompas maka dapat mengetahui posisi mata angin dari bumi.
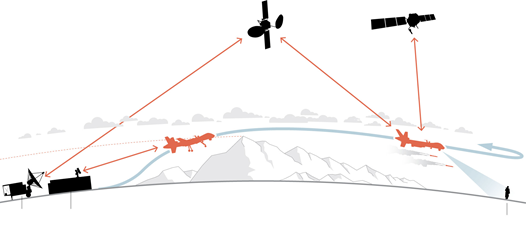
Selanjutnya terdapat sensor posisi menggunakan GPS. Sensor ini digunakan sebagai perangkat navigasi yang dapat menerima informasi dari satelit GPS dan mengetahui posisi geografis dari perangkat tersebut.
Berikutnya, terdapat beberapa aktuator yang digunakan pada UAV tergantung pada tipe UAV yang dibuat.
Pada UAV tipe Vertical Take-Off Landing (VTOL), aktuator yang digunakan adalah electronic speed controller digital -berfungsi untuk mengontrol rotasi per menit dari suatu motor-, yang dihubungkan kepada motor dengan tipe yang umum saat ini adalah Brushless DC Motor.
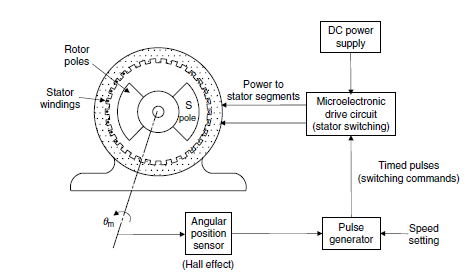
Pada Brushless DC Motor, berbeda dengan motor DC biasa, magnet permanen diletakkan pada bagian rotor dan elektromagnetik digerakkan kepada stator. Lalu menggunakan sinyal digital yang di program oleh kontroler untuk mengisi elektromagnetik saat porosnya berputar.
baca juga : Memilih Drone untuk Pemetaan
Kemudian pada tipe Fixed Wing, selain menggunakan Brushless DC Motor, digunakan juga servo yang digunakan untuk menggerakkan aileron, rudder, dan elevator pada sayapnya.
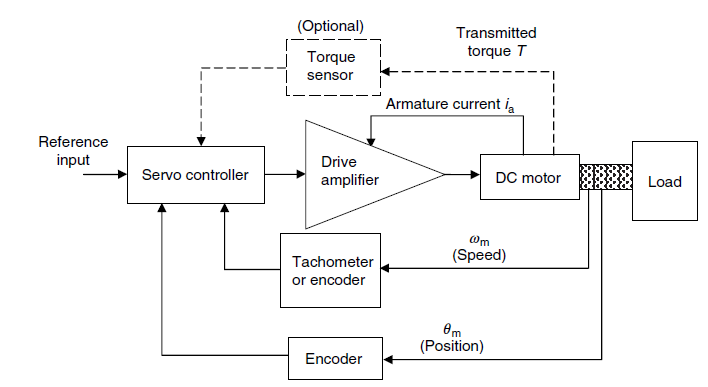
Servo ini bergerak dengan memiliki batas sudut pergerakkan, biasanya 180 derajat. Servo ini menerima sinyal digital yang akan di decode menjadi posisi dari servo tersebut. Kendali dari servo akan menentukan kecepatan dan posisi dari servo tersebut yang nantinya akan berpengaruh pada pergerakan mekanik dari UAV tersebut.
Demikian prinsip kerja UAV secara umum. Tentunya artikel ini dibuat untuk membuka wawasan terhadap seseorang yang ingin memulai memahami cara kerja dari suatu sistem UAV.
Sumber:
https://medium.com/@faizal.adila/prinsip-cara-kerja-uav-ed0ba9e3df74