Visualisasi 3D Apartemen dengan BIM: Memahami Bangunan Secara Menyeluruh
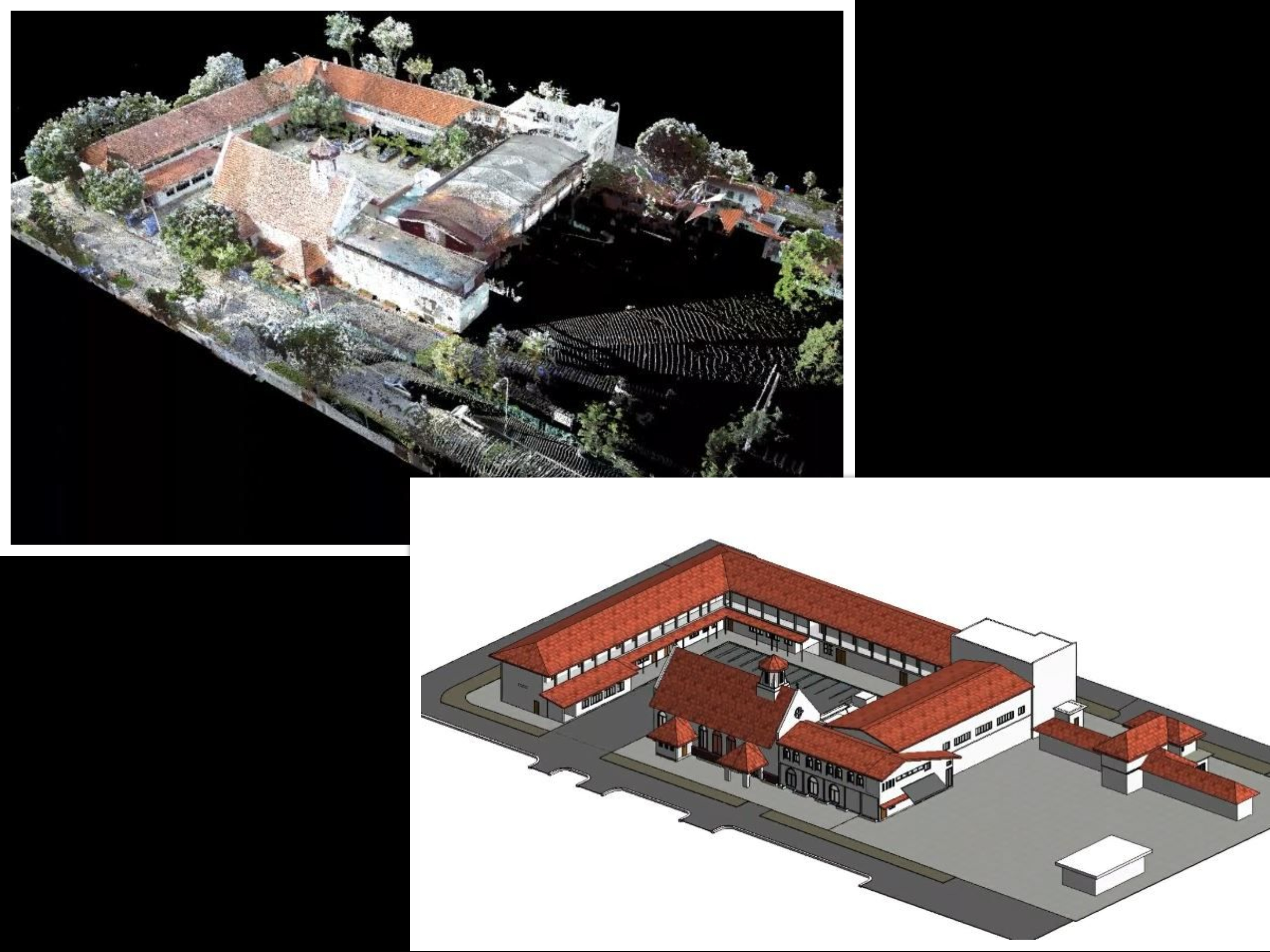
Dinamika industri konstruksi saat ini menuntut akurasi yang lebih tinggi dan risiko yang lebih rendah. Kita tidak lagi hanya bicara tentang membangun fisik, tetapi tentang bagaimana mengelola data bangunan tersebut. Video di atas menunjukkan bagaimana 3D BIM (Building Information Modeling) bekerja—bukan sekadar visualisasi, melainkan sebuah ekosistem data yang terintegrasi.
Bagi para pemangku kepentingan di industri properti, memahami peran BIM adalah langkah awal dalam mengoptimalkan seluruh siklus hidup aset, mulai dari meja desain hingga operasional harian gedung.
Sinkronisasi Data: Meminimalisir Ketidakpastian di Lapangan
Salah satu tantangan terbesar developer adalah adanya gap komunikasi antara dokumen desain dengan realitas di lapangan. 3D BIM hadir untuk menjembatani celah tersebut melalui:
Koordinasi Lintas Disiplin: Arsitektur, struktur, dan MEP kini berada dalam satu bahasa visual yang sama. Hal ini memungkinkan tim proyek mendeteksi potensi konflik teknis secara dini sebelum mobilisasi alat berat dimulai.
Efisiensi Biaya Melalui Presisi: Dengan visualisasi yang kaya data, estimasi kebutuhan material menjadi lebih terukur. Hal ini membantu manajemen dalam mengontrol anggaran secara lebih ketat dan transparan.
Nilai Tambah pada Fase Pasca-Konstruksi (Maintenance)
Keunggulan teknis dari model BIM sebenarnya baru benar-benar terasa ketika gedung mulai beroperasi. Model ini berfungsi sebagai “arsip hidup” yang mendukung efisiensi tim manajemen fasilitas:
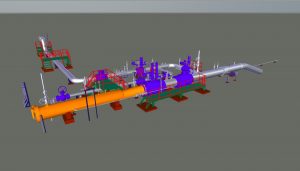
Navigasi Infrastruktur Tersembunyi: Tim pemeliharaan memiliki panduan presisi mengenai letak instalasi pipa atau kelistrikan di dalam dinding, sehingga proses perbaikan atau perawatan berkala dapat dilakukan dengan cepat tanpa merusak struktur secara berlebihan.
Keberlanjutan Nilai Aset: Gedung yang dikelola dengan data digital yang rapi cenderung memiliki biaya operasional yang lebih rendah dan nilai investasi yang lebih terjaga dalam jangka panjang.
Melangkah Menuju Konstruksi Berbasis Data
Implementasi 3D BIM memang memerlukan ketelitian dalam penyusunan modelnya, namun hasil yang diperoleh dalam hal efisiensi dan mitigasi risiko jauh melampaui investasi di awal. Visualisasi yang Anda lihat pada video di atas adalah salah satu contoh bagaimana teknologi ini memberikan kejelasan bagi setiap keputusan teknis yang diambil.