Registrasi Point Cloud Terrestrial Laser Scan dan Cara Melakukannya dengan Benar
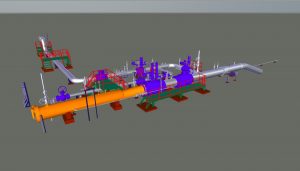
Point cloud hasil terrestrial laser scan merupakan informasi spasial yang masih perlu dilakukan pengolahan lebih lanjut. Proses selanjutnya adalah melakukan penyatuan seluruh point cloud yang terpisah-pisah berdasarkan pengambilan data.
Registrasi point cloud ke dalam satu sistem yang sama adalah awal pada pengolahan data hasil laser scan. Sistem yang digunakan bisa dengan sistem lokal maupun dengan sistem global. Registrasi ini akan membuat seluruh point cloud berkorelasi dan menyatu dalam satu sistem yang sama.
Langkah registrasi ini memiliki dampak terhadap akurasi data yang akan digunakan, serta berdampak terhadap proses selanjutnya pada pengolahan point cloud menjadi model 3 dimensi.

Beberapa hal teknis yang perlu diperhatikan saat melakukan registrasi point cloud berdasarkan pengalaman yang kami miliki adalah sebagai berikut:
- Lakukan Registrasi hasil TLS satu persatu berurutan sesuai perpindahan alat
Registrasi berurutan akan memudahkan dalam mengenali kesalahan, serta akan memudahkan dalam manejemen data. Setiap hasil scan akan dikenali dan jika terjadi kesalahan akan mudah dalam melakukan perbaikan.
- Pastikan korelasi antar scan pada target memiliki error yang kecil.
Korelasi antar scan ini mempengaruhi point cloud secara keseluruhan. Error akan mempengaruhi setiap point.
- Jika ditemukan hasil registrasi yang buruk buanglah korelasi target yang memiliki error terbesar
Korelasi target yang besar berpengaruh terhadap akumulasi error pada registrasi. Sehingga jika korelasi target yang error nya besar dibuang, maka error akan berkurang. Tetapi perlu diperhatikan bahwa target harus mempunyai ukuran lebih sehingga saat registrasi tidak kekurangan target yang akan dikorelasikan. Kami bahas masalah target pada tulisan sebelumnya.
- Fix-kan scan yang sudah teregistrasi dengan baik agar tidak berubah
Sebaiknya scan-scan yang sudah terigistrasi dengan baik di fix-kan supaya tidak terpengaruh oleh registrasi scan yang selanjutnya.
- Jika melibatkan scan yang banyak, buatlah grup/cluster registrasi
Kadang scan yang dilakukan bisa memuat banyak sekali tempat berdiri alat. Untuk manajemen data yang baik, lakukan grouping/cluster. Dengan grouping/cluster maka akan mudah dalam mengelola data point cloud hasil laser scan. Selain grouping/cluster, lakukan juga UNLOAD/HIDDEN (bukan DELETE) pada scan yang sudah teregistrasi dengan baik untuk scan yang berjumlah banyak.
Demikian beberapa hal yang bisa dilakukan dalam registrasi hasil scan. Mungkin masih ada beberapa trik lain yang bisa ditambahkan untuk mempermudah pekerjaan registrasi hasil terrestrial laser scan.