
Autonomous Survey Vessel (ASV) Bagian II Autopilot dan Sistem Navigasi
Bagian paling penting dari sebuah wahana autonomous/nirawak adalah autopilot. Pada bagian inilah program untuk bergerak secara mandiri diprogram. Autopilot yang ada dipasaran saat ini ada dua sistem dari berbagai merk. Sistem yang terbuka (open source) dan tertutup (proprietary). Keduanya mempunyai kelebihan dan kekurangan masing-masing.
Untuk Autonomous Survey Vessel (ASV) yang dibangun oleh PT Zona Spasial menggunakan open source karena kami nilai lebih gampang untuk disesuaikan dengan kondisi dan peralatan yang lain. Bukan berarti yang proprietary tidak bagus, hanya saja akan lebih rumit jika disesuaikan dengan peralatan yang berbeda-beda. Open source bisa diprogram sesuai dengan kebutuhan pada Autonomous Survey Vessel (ASV) yang kami bangun.
Sistem autopilot terhubung dengan perangkat lunak untuk pembuatan jalur pelayaran. Jalur pelayaran inilah yang nantinya akan memandu wahana ASV mengarungi perairan untuk melakukan survey. Pada prinsipnya, jalur-jalur pelayaran ini akan diunggah ke system autopilot dan akan memerintahkan wahana ASV mengikuti sesuai jalur.

Modul Autopilot dan Modul GPS
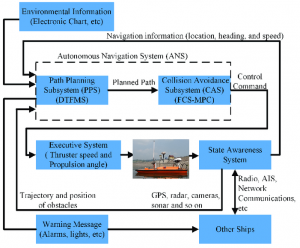
Adakalanya rencana jalur yang telah diunggah pada sistem autopilot mengalami perubahan akibat keadaan pada saat survei. Keadaan ini bisa diakibatkan oleh arus air, ombak maupun obyek-obyek yang membuat jalur menjadi melenceng. Untuk kejadian tersebut, perlu dilakukan koreksi terhadap Autonomous Survey Vessel (ASV) secara otomatis.
Koreksi dari sistem navigasi ini akan memberikan informasi ke autopilot bahwa rancangan jalur yang dilewati telah melenceng, maka autopilot akan memerintahkan ke motor untuk mengatur kecepatan putaran propeler dan memerintahkan rudder untuk manuver kapal sesuai jalur yang telah ditetapkan.
Navigation Chart ASV
Sistem navigasi yang terintegrasi pada autopilot membuat wahana ASV akan berjalan sesuai dengan jalur yang telah ditetapkan dan akan tetap pada jalur tersebut, sehingga pemeruman atau pengukuran kedalaman dan profil dasar wilayah perairan dapat diperoleh sesuai dengan yang direncanakan.
Demikian sedikit tentang sistem autopilot dan sistem navigasi pada ASV. Bagian selanjutnya kami akan membahas tentang peralatan survei hidrografi dengan SBES.







