Autonomous Survey Vessel merupakan sebuah kapal tanpa awak yang mampu digerakan secara otomatis dari suatu titik ke titik lain, biasanya digunakan untuk survei batimetri untuk mengumpulkan data atau perencanaan konstruksi bawah air. Survei batimetri merupakan salah satu survey di bidang hidrografi yang dilakukan untuk mengetahui data suatu kedalaman ataupun topografi dasar perairan. Alat yang digunakan untuk melakukan survei batimetri salah satunya adalah echosounder yang dipasangkan pada suatu kapal.
Sebagai perusahaan yang bergerak di bidang jasa survey dan pemetaan yang diantaranya merupakan survey pemetaan batimetri, PT. Zona Spasial menyediakan layanan survey batimetri yang efektif dan efisien dengan Autonomous Survey Vessel (ASV). Survey ini dikhususkan untuk wilayah perairan darat seperti danau, sungai kecil dan bendungan.
The Good Quality demands a lot of Maintenance
Dalam rangka mewujudkan kualitas layanan survey yang baik, kami senantiasa terus menerus memastikan serta menjaga seluruh aspek layanan dapat bekerja dengan optimal. Termasuk ASV yang kami gunakan untuk survey batimetri.
Pengecekan seluruh komponen fungsional penting untuk dilakukan agar ASV dapat selalu siap digunakan kapanpun dibutuhkan. Pengecekan meliputi seluruh fungsi, sistem pergerakan, perangkat lunak yang mendukung hingga pembersihan seluruh komponen guna menghindari terjadinya korosi.
Saat ini banyak sekali alat survey pemeruman (bathymetri) di pasaran. Pada tulisan ini pembahasan ditujukan untuk alat survey Single Beam Echosouder (SBES) dan Multibeam echosounder (MBES). Kedua alat ini mampu dibawa dan digunakan dengan ASV (Autonomous Survey Vessel). Penggunaan kedua jenis peralatan survey ini tergantung dari kebutuhan. Wahana pembawa pun harus disesuaikan. Jika hanya SBES, maka mini ASV sudah mencukupi, tetapi jika survey membutuhkan MBES maka harus digunakan ASV biasa yang mampu membawa MBES dan perlengkapan lainnya.
Perbedaan SBES dan MBES
Perbedaan utama antara SBES dan MBES tentu saja sonar yang dipancarkan, yaitu tunggal dan jamak. Demikian juga tangkapan hasil pulsa akustik dari keduanya juga berbeda. Berikut ini adalah perbedaan secara teknis:
Single Beam
Multibeam
– Pengaturan yang mudah
– Penggunaan yang mudah
– Memakan waktu lama untuk survey luasan
– Error mudah diidentifikasi
– Single atau dual frekuensi
– Pengaturan yang cukup rumit
– Efesien, karena mampu merekam luasan
– Deteksi kontak
– Penggunaan data yang multiguna
– Sumber error banyak
– HF Only
– File data yang masif
Keduanya, tentu saja, berbeda dalam penggunaan. Artinya tidak semua bisa dilakukan dengan SBES dan juga tidak semua survey hidrografi harus menggunakan MBES. Penggunaan kedua system itu harus disesuaikan kebutuhan. Misal kebutuhan hanya merekam kedalaman serta profil kontur kedalaman, cukup dengan SBES. Demikian juga jika perlu perhitungan sedimentasi, kita bisa menggunakan SBES dual frekuensi, tidak perlu MBES.
SBES untuk Kedalaman dan Profil Kontur
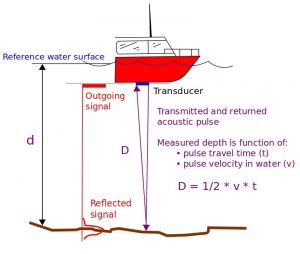
Bagaimana cara penggunaan dan system kerja SBES? Dalam gambar berikut ini dapat menjelasakan bagaimana sebuah echosounder bekerja.
Beda waktu pelepasan sinyal dan penangkapan echo (sinyal balikan) dapat digunakan dalam perhitungan jarak, setelah mempertimbangkan juga velocity pada air. Jarak tersebut akan direkam sebagai kedalaman pada saat itu. Dengan banyaknya titik perekaman maka akan didapatkan kontur kedalaman dari area yang disurvey.
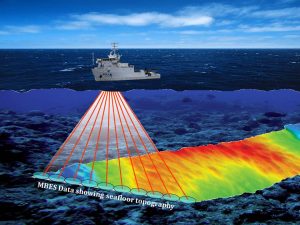
MBES untuk Profiling Detail
Prinsip kerja MBES pada dasarnya sama yaitu perhitungan waktu antara pelepasan pulse dengan penangkapan pulse oleh alat. Yang membedakan jika SBES pengiriman dan penangkapan sinyal hanya tunggal maka pada MBES sinyal yang dikirim maupun ditangkap jamak/multiple. Karena sinyal yang ditangkap oleh MBES bersifat multiple/jamak, maka bentuk permukaan yang dapat digambarkan juga bersifat luasan bukan hanya satu titik.
Pemanfaatan Alat Survey Hidrografi
Penggunaan SBES (Single Beam Echosounder) masih terbatas untuk mengetahui dasar permukaan bawah air dan untuk memetakan kontur bawah permukaan. Hal ini disebabkan keterbatasan SBES dalam memberikan hasil. Untuk keperluan praktis dan kecepatan dalam penggambaran kontur bawah permukaan air, SBES tentu saja lebih menguntungkan. Selain hal tersebut, biaya juga lebih murah.
Pemanfaatan MBES (Multibeam Echosounder) bisa dilakukan untuk mendapatkan profiling yang lebih detil. Misalnya untuk pendeteksian obyek di bawah permukaan air atau menggambarkan bangunan bawah air (mis, bendungan).
Bagian paling penting dari sebuah wahana autonomous/nirawak adalah autopilot. Pada bagian inilah program untuk bergerak secara mandiri diprogram. Autopilot yang ada dipasaran saat ini ada dua sistem dari berbagai merk. Sistem yang terbuka (open source) dan tertutup (proprietary). Keduanya mempunyai kelebihan dan kekurangan masing-masing.
Untuk Autonomous Survey Vessel (ASV) yang dibangun oleh PT Zona Spasial menggunakan open source karena kami nilai lebih gampang untuk disesuaikan dengan kondisi dan peralatan yang lain. Bukan berarti yang proprietary tidak bagus, hanya saja akan lebih rumit jika disesuaikan dengan peralatan yang berbeda-beda. Open source bisa diprogram sesuai dengan kebutuhan pada Autonomous Survey Vessel (ASV) yang kami bangun.
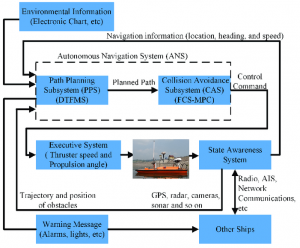
Sistem autopilot terhubung dengan perangkat lunak untuk pembuatan jalur pelayaran. Jalur pelayaran inilah yang nantinya akan memandu wahana ASV mengarungi perairan untuk melakukan survey. Pada prinsipnya, jalur-jalur pelayaran ini akan diunggah ke system autopilot dan akan memerintahkan wahana ASV mengikuti sesuai jalur.
Modul Autopilot dan Modul GPS
Adakalanya rencana jalur yang telah diunggah pada sistem autopilot mengalami perubahan akibat keadaan pada saat survei. Keadaan ini bisa diakibatkan oleh arus air, ombak maupun obyek-obyek yang membuat jalur menjadi melenceng. Untuk kejadian tersebut, perlu dilakukan koreksi terhadap Autonomous Survey Vessel (ASV) secara otomatis.
Koreksi dari sistem navigasi ini akan memberikan informasi ke autopilot bahwa rancangan jalur yang dilewati telah melenceng, maka autopilot akan memerintahkan ke motor untuk mengatur kecepatan putaran propeler dan memerintahkan rudder untuk manuver kapal sesuai jalur yang telah ditetapkan.
Navigation Chart ASV
Sistem navigasi yang terintegrasi pada autopilot membuat wahana ASV akan berjalan sesuai dengan jalur yang telah ditetapkan dan akan tetap pada jalur tersebut, sehingga pemeruman atau pengukuran kedalaman dan profil dasar wilayah perairan dapat diperoleh sesuai dengan yang direncanakan.
Demikian sedikit tentang sistem autopilot dan sistem navigasi pada ASV. Bagian selanjutnya kami akan membahas tentang peralatan survei hidrografi dengan SBES.
Sedimen yang dibawa oleh sungai-sungai yang mengalir ke sebuah bendungan/waduk semakin lama akan membuat pengendapan dan mendangkalkan bendungan/waduk tersebut. Monitoring terhadap hal ini bisa dilakukan dengan berkala. Dangkalnya suatu bendungan/waduk tentu saja berpengaruh terhadap kapasitas/daya tampung air yang dibutuhkan.
Pengukuran berkala bisa dilakukan dengan memanfaatkan peralatan survey hidrografi. Pengukuran kedalaman dengan Single Beam Echosounder (SBES) sudah mencukupi untuk keperluan ini.
Peralatan
yang dibutuhkan untuk mengukur dasar waduk antara lain:
Autonomous Survey Vessel (ASV) atau kapal tanpa awak/nirawak untuk wahana alat survey
Global Positioning System (GPS/GNSS), untuk melakukan pengukuran posisi kapal dan alat survey kedalaman
Single Beam Echosounder (SBES), alat yang memancarkan sonar suara yang digunakan untuk mengukur kedalaman
Autopilot, digunakan sebagai pemandu ASV dalam melakukan survey
Hasil akhir yang didapatkan adalah posisi horizontal (X dan Y) serta posisi kedalaman (Z). Berdasarkan hasil tersebut dapat digambarkan kontur kedalaman dasar waduk/bendungan.