Penggunaan 3D laser scan untuk melakukan survey bagi dunia perkapalan sudah lama terjadi. Kecepatan dalam pengambilan data dan ketelitian dalam penggambaran adalah alasan utama penggunaan laser scan dan 3D model tersebut. Hasil akhir dari survei 3D Laser Scan tersebut dapat dimanfaatkan untuk navigasi kapal, retrofit, refurbishment, renovation maupun asuransi.
Model 3D kapal untuk As Built
Salah satu kegunaan as built kapal adalah untuk mengetahui ukuran dan bentuk sebenarnya dari kapal tersebut, sehingga jika dilakukan perubahan maupun perbaikan maka marine engineers dapat menyesuaikan. 3D laser scan mampu bekerja optimal untuk memberikan model yang akurat. Akurasi ini penting bagi maintenance karena perbaikan harus sesuai/tepat dengan ukuran yang diberikan.
Gambar 1. As Built Kapal
As built ini juga dapat dimanfaatkan untuk kebutuhan lain, misalnya marketing. Calon penyewa kapal akan dimudahkan dalam inspeksi sebelum melakukan transaksi penyewaan. Gambar 3D yang aktual dan presisi mampu disajikan dari hasil modeling 3D laser scan.
Retrofit, Refurbishment & Structural Alteration
Marine engineer dapat melakukan perubahan pada sebuah kapal. Baik itu perubahan fungsi maupun perubahan area pada kapal. Perubahan ini memerlukan gambar sebelum dan sesudah secara detail dan akurat. 3D laser scan dapat membantu dalam mendapatkan gambaran akurat dari sebuah kapal maupun bagian-bagian dalam kapal.
Gambar 2. Hull, propeller dan struktur dalam kapal
Setelah mendapatkan gambar dan ukuran yang sesuai dengan sebenarnya, maka marine engineer akan membuat rencana kerja dan melakukan perubahan tersebut. Setelah selesai maka perlu dilakukan survei 3D Laser scan kembali untuk mendapatkan gambaran setelah dilakukan perubahan dan as built bagi maintenance.
Banjir yang terjadi hampir tiap musim penghujan merupakan pengingat kita untuk menata kembali sungai dan Daerah Aliran Sungai (DAS) di sekitarnya. Penataan ini baik dengan nama normalisasi maupun naturalisasi selalu membutuhkan peta eksisting dan terbaru.
Minimal ada 2 (dua) peta yang harus tersedia untuk melakukan perencanaan tersebut, yaitu peta batimetri kedalaman sungai dan peta situasi DAS. Kedua peta tersebut jika dikombinasikan akan menjadi dasar perencanaan penataan sungai dan DAS.
Peta Batimetri untuk Kedalaman Sungai
Sedimentasi baik secara alami, yaitu lumpur dan sedimen dari hulu yang terbawa arus maupun sedimentasi akibat sampah yang dibuang di sungai, merupakan penyebab pendangkalan sungai. Pendangkalan ini menyebabkan daya tampung sungai menjadi berkurang dan bisa menyebabkan meluapnya sungai, jika terjadi kenaikan volume air pada sungai tersebut.
Bagaimana peta kedalaman sungai didapatkan?
Tentu saja survei batimetri perlu dilakukan untuk mendapatkan peta tersebut. Dengan Single Beam Echosounder (SBES) sudah cukup jika yang diharapkan adalah kedalaman sungai pada waktu tertentu. SBES merupakan salah satu alat akustik yang dapat dibawa oleh moda transportasi sungai biasa maupun dengan ASV (Autonomous Survey Vessel)/Kapal survei nirawak. Kapal survei Nirawak (ASV) ini sangat fleksibel dalam mobilisasi, sehingga penggunaannya akan memudahkan dalam pekerjaan survei batimetri.
Gambar 1. Autonomous Survey Vessel (ASV) untuk survey batimetri
Dengan menggunakan model autopilot dan jalur survei yang telah ditentukan, ASV ini dapat membawa SBES dan merekam kedalaman sungai secara otomatis. Dilengkapi dengan positioning RTK (Real Time Kinematik), maka koordinat serta kedalaman dapa diplot menjadi peta batimetri. Melalui pengolahan data yang relative mudah, maka kita akan tahu kedalam sungai pada waktu tertentu (pada saat survei dilakukan). Jika kita melakukan survei berkala, maka akan didapatkan laju endapan sedimentasi (baik natural maupun sampah).
Gambar 2. Peta Batimetri kedalaman perairan dan proses surveynya
Peta batimetri yang didapatkan, bisa dijadikan dasar pengerukan sungai untuk mendapatkan daya tampung sesuai dengan yang diharapkan.
Peta DAS (Daerah Aliran Sungai)
Peta Daerah Aliran Sungai adalah peta yang berisi informasi obyek-obyek pada sekitar aliran sungai tersebut. Obyek tersebut bisa berupa tutupan lahan, pemukiman dan lain sebagainya. Daerah Aliran Sungai (DAS) merupakan penyangga dari sungai tersebut. Pemanfaatan lahan DAS ini seringkali berbeda dari yang sudah ditetapkan pada Rencana Tata Ruang Wilayah (RTRW). Hal ini karena keterbatasan lahan hunian maupun lainnya.
Gambar 3. Jenis-jenis Drone/UAV
Pemetaan DAS ini bisa dilakukan dengan berbagai cara baik darat maupun udara. Pemetaan dengan darat, lebih lama serta berbiaya relatif lebih mahal. Sedangkan pemetaan dengan foto udara menggunakan pesawat Nirawak akan memprcepat proses pengadaan peta DAS. Hasil peta foto dari pesawat nirawak akan diolah menjadi DSM, DTM maupun tutupan lahan.
Gambar 4. Sebagian Daerah Aliran Sungai (DAS)
Peta tutupan lahan tersebut dapat digunakan untuk perencanaan terhadap DAS maupun sungai itu sendiri (baik naturalisasi maupun normalisasi). Perubahan peruntukan kawasan sekitar sungai tentu saja dapat memperkecil lebar sungai. Bahkan jika ada bangunan di bibir sungai, maka aliran sungai akan menjadi terhambat.
Dengan menggunakan peta tersebut, maka rencana untuk memperlebar maupun memperbaiki aliran sungai akan bisa dilakukan dengan lebih baik. Jumlah rumah akan terhitung, luasan lahan kepemilikan dapat terhitung juga, sehingga ganti rugi (jika akan dilakukan penggusuran) akan bisa langsung dilakukan perhitungan.
Penggabungan Data Batimetri dan Data Foto Udara
Setelah kedua data tersebut didapatkan, maka penggabungan dapat dilakukan, karena kedua peta tersebut mengacu pada koordinat global yang sama. Tentu saja titik kontrol terhadap kedua peta tersebut harus dalam sistem koordinat yang sama.
Dengan penggabungan kedua peta tersebut, maka kita akan mempunyai peta perencanaan yang lebih bagus lagi. Beberapa hal yang bisa dilakukan dengan menggunakan kedua peta tersebut antara lain:
Seringkali terdapat pertanyaan dari client maupun calon client, seberapa efektif pesawat nirawak digunakan untuk pemetaan? Dan berapa luas area efektif yang dapat dipetakan dengan pesawat nirawak?
Tentu saja pertanyaan itu wajar, karena penggunaan pesawat nirawak untuk pemetaan relatif merupakan teknologi baru bagi client maupun calon client. Kami akan mencoba menjawabnya dalam artikel ini.
Pemetaan apa yang dapat dilakukan dengan pesawat nirawak?
Pemetaan yang biasa dilakukan oleh client/calon client biasanya adalah pemetaan spesifik atau yang biasa disebut pemetaan tematik. Cakupan luasan yang khusus maupun informasi yang akan ditampilkan juga spesifik, maka pemetaan ini disebut pemetaan tematik. Beberapa pemetaan yang biasanya dilakukan secara tematik antara lain:
Pemetaan batas kepemilikan lahan
Pemetaan kontur pada area tertentu
Pemetaan tutupan lahan (Landuse)
Dan pemetaan tematik lainnya.
Selain itu ada juga pemetaan lebih spesifik seperti pemetaan jalur pipa, jalur jalan, sebaran kebocoran gas (biasanya hal ini masuk dalam bidang inspeksi), pemetaan 3D (3D smart city, termasuk di dalamnya), pemetaan untuk pemantauan kemajuan pembangunan infrastruktur dan lain-lain.
Lalu bisakah semua itu dilakukan dengan pesawat nirawak? Tentu saja bisa.
Hanya saja mungkin sensor yang dibawa berbeda-beda. Sensor ini disesuaikan dengan kebutuhan pengguna. Misalnya untuk kebocoran gas, maka tidak bisa digunakan kamera biasa, harus dengan kamera pendektesi panas (thermalcamera). Demikian juga jika akan melakukan pemetaan untuk kawasan yang padat vegetasi, maka pilihan terbaik sensor adalah dengan LiDAR Drone, karena kemampuannya yang unggul dalam menembus vegetasi.
Jenis Sensor pada Pesawat Nirawak
Kesimpulannya, kemampuan pesawat nirawak untuk pemetaan sangat luas cakupannya. Hanya saja sensor yang dibawa berbeda-beda sesuai dengan kebutuhan.
Berapa cakupan efektif pesawat nirawak untuk pemetaan ?
Saat ini jenis pesawat nirawak dipasaran sangat beragam. Dari yang murah sampai dengan yang mahal sekali. Demikian juga endurance yang ditawarkan sangat beragam, mulai yang hanya 10 menit sampai dengan lebih dari 2 jam. Demikian juga sensor yang dapat dibawa, sangat beragam. Keragaman ini memungkinkan pengguna lebih mudah menyesuaikan dengan kebutuhannya.
Untuk menjawab pertanyaan efektivitas luasan yang dapat dipetakan dengan pesawat nirawak, tentu saja harus dihubungkan dengan endurance. Semakin lama endurance, akan semakin luas cakupan yang diperoleh. Tetapi ini tentu saja ada batasan, yaitu payload yang mampu dibawa oleh pesawat. Endurance yang lama memerlukan baterei dengan daya yang besar, baterei dengan daya besar akan menambah beban pesawat nirawak yang ada batas payloadnya.
Kunci dari efektivitas penggunaan pesawat nirawak adalah pemahaman tentang kebutuhan pemetaan yang akan dilakukan. Jika pemetaan yang akan dilakukan hanya mencakup luasan kecil, atau hanya area-area tertentu saja, maka kebutuhan ini bisa diatasi dengan menggunakan pesawat nirawak jenis multirotor. Tetapi jika luasan yang akan dipetakan mencakup area yang besar maka kebutuhan ini bisa dipenuhi dengan menggunakan pesawat nirawak jenis fixwing/flywing, yang mempunyai endurance lebih lama.
Dengan demikian, pertanyaan mengenai cakupan luas yang menjadi pertanyaan terjawab sudah, yaitu antara luasan area yang sempit +/- 1Ha sampai dengan 10.000 Ha. Di atas luasan tersebut, maka penggunaan pesawat nirawak menjadi tidak efektif karena waktu yang dibutuhkan untuk melakukan survei menjadi lebih lama.
Dalam artikel ini yang akan dibahas tentang 3D Inspectiontank dengan menggunakan data pointcloud dari Laser Scan. Penggunaan inspeksi 3D untuk tangki ini merupakan bagian dari maintenance yang disyaratkan.
Laser Scan untuk mendapatkan 3D Model Tangki
Peruntukan laser scan dalam analisis tangki adalah untuk mendapatkan pointcloud dari tangka yang akan diinspeksi. Laser scan survei harus mampu men-capture seluruh bagian dari tangki, sehingga akan memudahkan dalam pembentukan model 3 dimensi. Proses selanjutnya, tentu saja adalah registrasi dari hasil scan (https://zonaspasial.com/2019/10/registrasi-point-cloud-terrestrial-laser-scan-dan-cara-melakukannya-dengan-benar/). Setelah terbentuk pointcloud yang benar dari registrasi maka dapat dilakukan proses selanjutnya yanitu cleaning. Cleaning ini untuk membuang/menghapus obyek-obyek di luar tangki yang akan dimodelkan. Proses ini untuk memudahkan modeler dalam membangun obyek 3 Dimensi.
Gambar1. Tank Pointcloud
Setelah pointcloud dibersihkan dari obyek yang tidak diperlukan, maka proses selanjutnya adalah membuat mesh modeling atau model permukaan tangki. Model permukaan ini yang akan membentuk tangka seperti keadaan sebenarnya.
Bentuk tangka yang seperti aslinya (as is) akan digunakan sebagai baseanalisys. Permukaan yang terlihat secara visual (pandangan mata) seringkali berbeda dengan yang didapatkan dari hasil mesh modeling ini. Lekukan-lekukan kecil tidak akan terlihat oleh mata manusia. Bahkan dalam gambar hasil mesh model, mata kita seringkali tidak menemukan lekukan yang terjadi oleh berbagai sebab. Untuk itulah analisis perlu dilakukan.
Gambar 2. Mesh Modeling Tangki
Analisis 3D Inspection
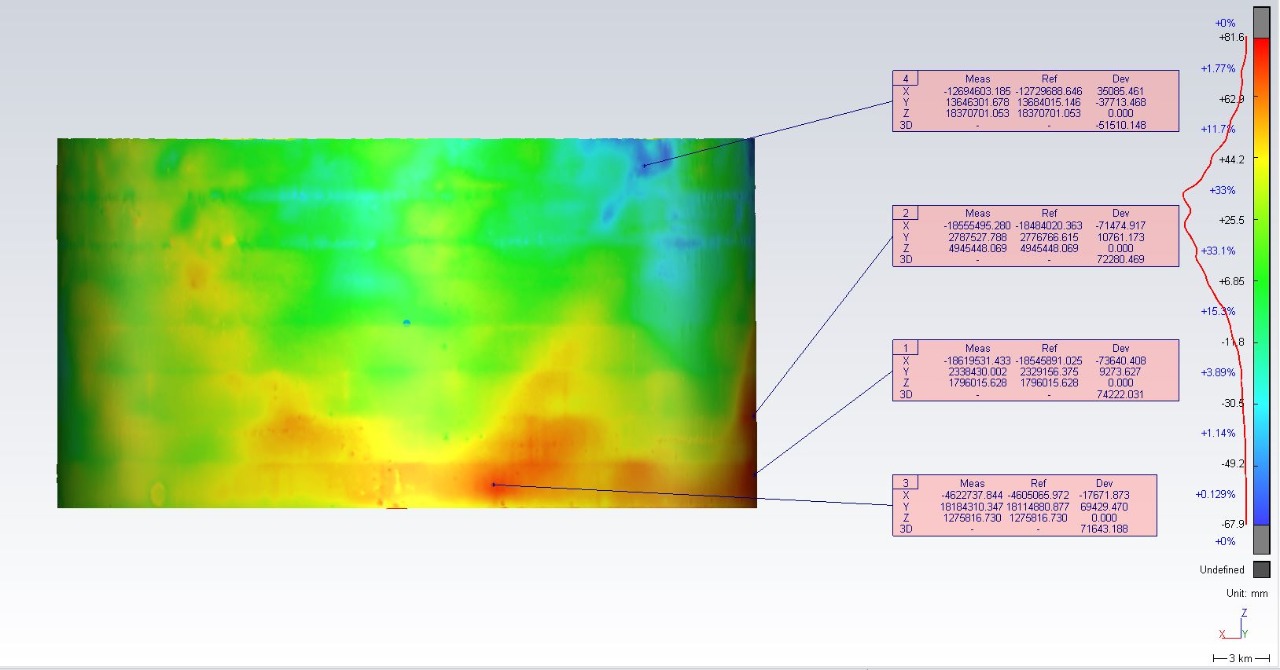
Setelah model permukaan (mesh model) terbentuk, maka proses 3D Inspection dapat dilakukan terhadap permukaan tangki. Analisa ini akan membentuk warna berbeda bagi setiap permukaan. Tentu saja harus ada rujukan yang pasti sehingga permukaan yang melengkung dapat teridentifikasi.
Permukaan melengkung ini dapat berupa lengkungan ke dalam maupun lengkungan ke luar. Perbedaan warna dari permukaan menunjukkan kelengkungan permukaan yang dianalisa.
Gambar 3. 3D Inspection
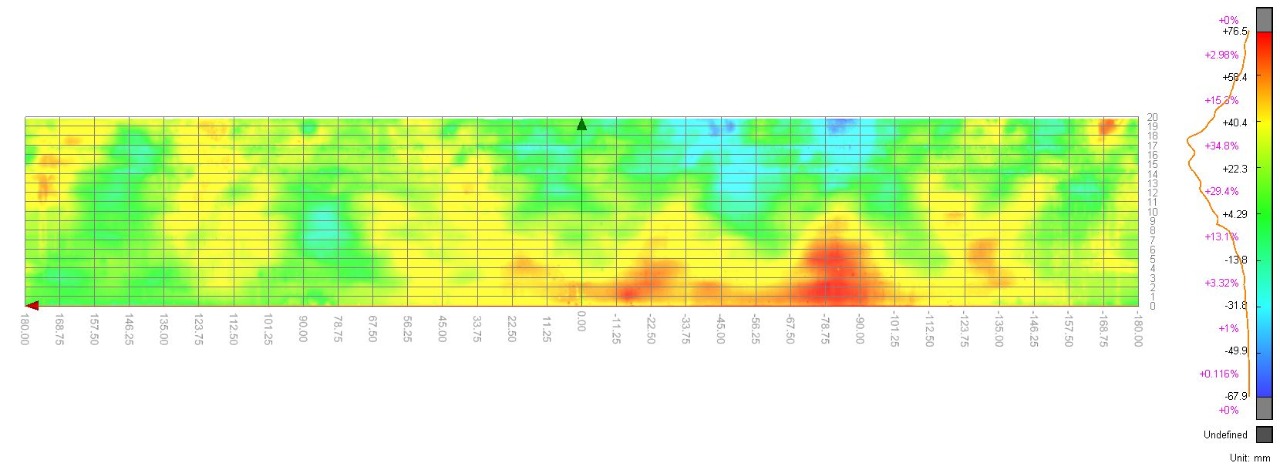
Selain 3D Inspection, analisis bisa ditambahkan dengan membentangkan permukaan menjadi color map. Dengan membentangkan permukaan tangki maka akan lebih mudah secara visual dilakukan Analisa.
Building Information Modeling (BIM) saat ini merupakan salah satu bahasan yang populer. Sedangkan Scan/Laser Scan sudah beberapa saat lalu populer untuk mendapatkan gambaran 3D (3 Dimensi) atau biasa disebut modeling. Lalu apakah hubungan antara Laser scan dengan BIM? Bagaimana membuat BIM dengan menggunakan teknologi laser scan?
Laser Scan Untuk pembuatan 3D Model
Pengambilan laser scan untuk membuat suatu model, dalam hal ini bangunan (building) merupakan hal yang esensial untuk persiapan BIM. Kami pernah membahas tips dan trik pengambilan laser scan ini (https://zonaspasial.com/2019/10/tip-trik-melakukan-survei-dengan-terestrial-laser-scan/). Dengan pengambilan data pointcloud yang baik dengan menggunakan laser scan, maka diharapkan hasil modeling yang akan dibuat bahan BIM juga akan menjadi baik. Perlu diingat bahwa laser scan hanya mengambil data sesuai apa yang terlihat mata dan tidak bisa tembus tembok atau benda lain. Sehingga segala perkabelan dan pipa yang tertanam di dalam struktur bangunan tidak akan tercapture.
Proses pengambilan data laser scan ini melibatkan pointcloud yang besar serta foto-foto. Data yang besar ini perlu manajemen yang baik. Apalagi jika bangunan yang diambil datanya besar serta banyak, maka manajemen data serta manajemen pengambilan harus dirancang secara baik.
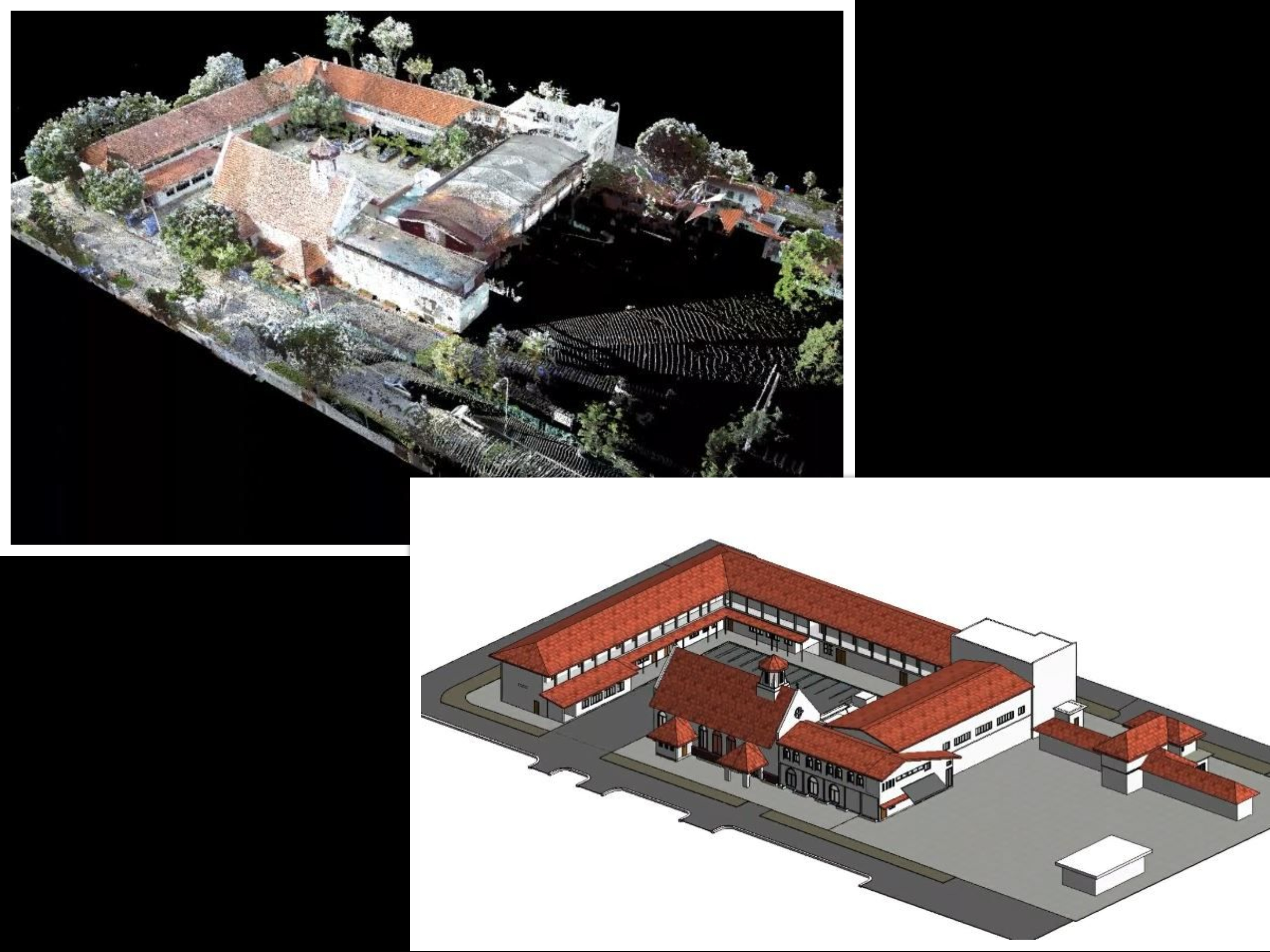
Pointcloud to 3D Model
Modeling dan Data Atribut
Setelah registrasi dan pembersihan pointcloud, maka modeling dapat dilakukan sesuai dengan keadaan sebenarnya (as built) sebuah bangunan. Proses modeling ini membutuhkankan detil yang teliti. Modeling as built bisa memakai solid, jika hasil yang diinginkan hanya model/gambar saja. Tetapi jika ingin menggunakan sebagai BIM, maka modeling bisa dilakukan dengan Revit, atau software BIM yang lain. 3D model yang dibuat sebagai as built mungkin akan sedikit berbeda angka-angka ukuran, karena dalam proses pekerjaan Gedung/building pasti terdapat penyesuaian.
Model BIM ini mempunyai kelebihan yaitu adanya basis data non spasial atau biasa disebut atribut. Data atribut ini penting sekali dalam proses BIM, karena akan menerangkan model yang dibuat. Semakin lengkap atribut yang dimasukkan ke dalam sebuah model, akan semakin bagus.
Section and BIM
Setelah data model dan atribut menyatu sebagai system informasi, maka BIM untuk sebuah bangunan sudah bisa disajikan untuk keperluan engineering, Keperluan utama sebuah as built biasanya untuk maintenance. Dengan data ukuran yang sesuai aslinya serta atribut dari masing-masing bagian, maka bagian maintenance akan dimudahkan dalam melakukan kegiatannya. Selain itu juga, jika akan dilakukan renovasi, maka kesiapan data BIM akan sangat membantu dalam pelaksanaan renovasi.
PT Zona Spasial seringkali mengadakan pelatihan untuk survei dan pemetaan. Pelatihan ini meliputi pelatihan pemetaan dengan drone, pelatihan survei dengan laser scan maupun pelatihan untuk survei bathimetri (akan segera hadir). Hal ini disesuaikan dengan bidang bisnis yang ada di PT Zona Spasial. Pelatihan ini ada yang bersifat internal maupun eksternal.
Pelatihan internal tentu saja untuk mengembangkan kapabilitas dari staf PT Zona Spasial. Untuk staf baru, tentu saja, pelatihan ini mandatory. Kemampuan staf baru harus disesuaikan dengan kebutuhan yang ada pada perusahaan. Sedangkan untuk staf lama, pelatihan ini untuk mengembangkan keahlian pada bidangnya maupun mempelajari lebih mendalam tentang bidang yang digelutinya. Pelatihan internal bisa berupa pelatihan peralatan, perangkat lunak maupun manajemen.
Pelatihan eksternal, beberapa kali juga kami selenggarakan. Pelatihan eksternal ini biasanya dilakukan dengan memberikan materi dasar pemetaan dengan drone/UAV, Laser Scan dan 3D Modeling serta pelatihan survei batimetri. Pelatihan ini ditujukan untuk peserta di luar staf PT Zona Spasial.
Sumber daya Manusia
Ketersediaan sumber daya manusia yang mempunyai kapabilitas yang sesuai dengan kebutuhan perusahaan merupakan permasalahan yang ada sejak dulu. Keluar-masuknya personil dalam suatu perusahaan kadang menjadi masalah jika ada keterbatasan sumber daya. Apalagi perusahaan konsultan yang mengandalkan manusia sebagai aset terbesarnya.
Mengatasi hal tersebut, maka pelatihan secara berkala merupakan salah satu solusi, sehingga terjadi kesinambungan pengetahuan dan tidak ada “jomplang” skill yang dimiliki. Pelatihan eksternal juga membantu menyelesaikan masalah jika suatu saat perusahaan membutuhkan tenaga kerja yang terlatih pada waktu tertentu. Ketersediaan pasar tenaga kerja yang mumpuni (sesuai dengan bidangnya) akan sangat membantu dalam proses rekrutmen.
Sumber daya manusia yang terlatih dan mumpuni hanya bisa dicapai dengan pelatihan yang berkesinambungan. Pengetahuan tentang hardware, software serta manajemen terbaru harus selalu ditingkatkan. Dengan demikian maka masalah ketersediaan sumber daya manusia dapat teratasi.
Perkembangan dunia survey dengan drone saat ini sudah semakin maju. Jika pada era sebelumnya foto udara dengan drone/UAV ini menggunakan penerbangan secara manual, maka saat ini sudah bisa fully autopilot. Demikian juga sensor yang dibawa, baik sensor pengambilan data raster maupun sensor posisi.
Untuk positioning, jika dulu yang tersedia hanya GNSS biasa, saat ini sudah bisa menggunakan RTK. Sensor pengambilan data pun mengalami kemajuan, jika dulu hanya data raster berupa kamera foto, saat ini sudah tambahkan sensor LiDAR.
Kebutuhan akan ketelitian Digital Terrain Model (DTM) atau kontur yang dihasilkan oleh pemetaan dengan Drone/UAV yang mendasari adanya sensor LiDAR pada drone/UAV. Dengan sensor LiDAR ini maka diharapkan permasalahan ketelitian tersebut dapat diatasi. Keunggulan Sensor LiDAR akan menambah ketelitian DTM yang dihasilkan pada survey dengan menggunakan Drone/UAV.
Kemampuan LiDAR dalam menembus vegetasi yang rapat untuk mendapatkan ground merupakan kelebihan yang mampu meningkatkan akurasi DTM/Kontur. Jika menggunakan foto udara biasa, maka daerah dengan kanopi/tutupan yang padat (misalkan hutan) akan sulit didapatkan DTM/Kontur yang akurat. Daerah dengan tutupan yang padat akan dilakukan interpolasi jika menggunakan foto udara biasa. Interpolasi tentu saja sangat menyulitkan dan kurang akurat jika daerah tersebut sangat luas lingkupannya.
Penggabungan dua sensor pengambilan data yaitu kamera dan LiDAR akan membuat akurasi data semakin baik. Data LiDAR dilengkapi dengan coloring dari hasil kamera serta data kamera dengan posisi ground menggunakan data LiDAR merupakan kombinasi yang memperkuat akurasi hasil survei dengan wahana nirawak.
Pembangunan harus dimulai dari desa. Tingkat urbanisasi yang semakin besar perlu upaya yang sungguh-sungguh dalam membangun desa. Urbanisasi tidak hanya menjadi masalah kota yang dituju (yang menyebabkan persaingan pencari kerja dan dampak sosial lainnya), tetapi juga menjadi masalah bagi desa yang ditinggalkan, yaitu kekurangan tenaga kerja.
Pembangunan desa tak bisa dipungkiri harus mampu menyerap tenaga kerja dan memakmurkan penduduk desa. Lalu apa yang diperlukan? Tentu saja perencanaan pembangunan yang bagus, yang sesuai dengan karakter serta potensi desa yang bersangkutan. Perencanaan tentu saja tidak luput dari peta. Perencanaan pembangunan tanpa peta, bagaimana bisa?
Berita tentang Peta Desa
Seperti dikatakan oleh Guru Besar Fakultas Geografi UGM, Prof. Dr. Aris Marfa’i bahwa ada enam urgensi pembuatan peta desa, yaitu untuk mengetahui posisi desa terhadap kawasan di sekitarnya, melihat potensi desa, menyelesaikan sengketa batas wilayah, inventarisasi aset desa dan pengelolaan Badan Usaha Milik Desa, membantu perencanaan pembangunan infrastruktur desa, serta sebagai dasar informasi untuk integrasi spasial pembangunan wilayah. (https://ugm.ac.id/id/berita/11263-peta-desa-percepat-pembangunan-desa-dan-kawasan-pedesaan)
Demikian pentingnya peta bagi pembangunan desa, lalu apakah sudah terakomodasi dalam peraturan pemerintah. Sayangnya dalam Permendesa PDTT No 11 Tahun 2019 tentang Prioritas Penggunaan Dana Desa tahun 2020, pengadaan peta desa untuk perencanaan tidak disebutkan.
Peta Desa Lembang yang dikerjakan oleh ITB
Peta Desa bukan hanya batas wilayah desa, melainkan juga peta yang mampu memuat apa saja yang ada di desa tersebut. Sumber daya alam, pariwisata, sumber daya manusia dan aset-aset desa yang lain. Dengan kelengkapan tersebut, maka peta desa dapat menjadi acuan yang lebih berdaya guna sebagai bahan perencanaan pembangunan desa. Dana desa akan lebih terserap sesuai dengan apa yang dibutuhkan oleh desa.
Peralatan survei saat ini mengalami kemajuan yang pesat. Baik dari segi kapasitas maupun kapabilitas, mengalami peningkatan yang signifikan. Capturing data yang cepat dan detil merupakan pilihan yang tak bisa dipungkiri. Dengan kecepatan yang semakin bagus, maka efesiensi waktu dapat dilakukan. Demikian juga semakin detil dan akurat data yang didapat maka efektivitas kerja dapat meningkat.
Selain hal tersebut, hal lain yang dipandang sangat penting adalah safety. Keselamatan kerja pada saat survei merupakan hal yang utama. Prioritas yang harus dijunjung oleh perusahaan survei melakui HSE Statement.
Berbagai Alat Survey Otomasi
Alat survey darat
Beberapa alat survei darat yang sudah dapat melakukan survei secara otomatis, yang paling terkenal adalah Robotic Total Station. Penggunaan robotic TS ini jelas akan lebih efesien pada tenaga kerja. Hanya perlu surveyor yang mengoperasikan serta alat Robotic TS
Trimble S8 Robotic Total Station
Alat lain yang sudah melakukan otomasi adalah TLS (Terrestrial Laser Scan). Alat ini, dengan setting tertentu, akan melakukan pengambilan data secara otomatis ke lingkungan/area survei. Hanya perlu pemasangan target pada titik tertentu, dan alat akan otomatis meng-capture-nya.
Laser Scanner FARO
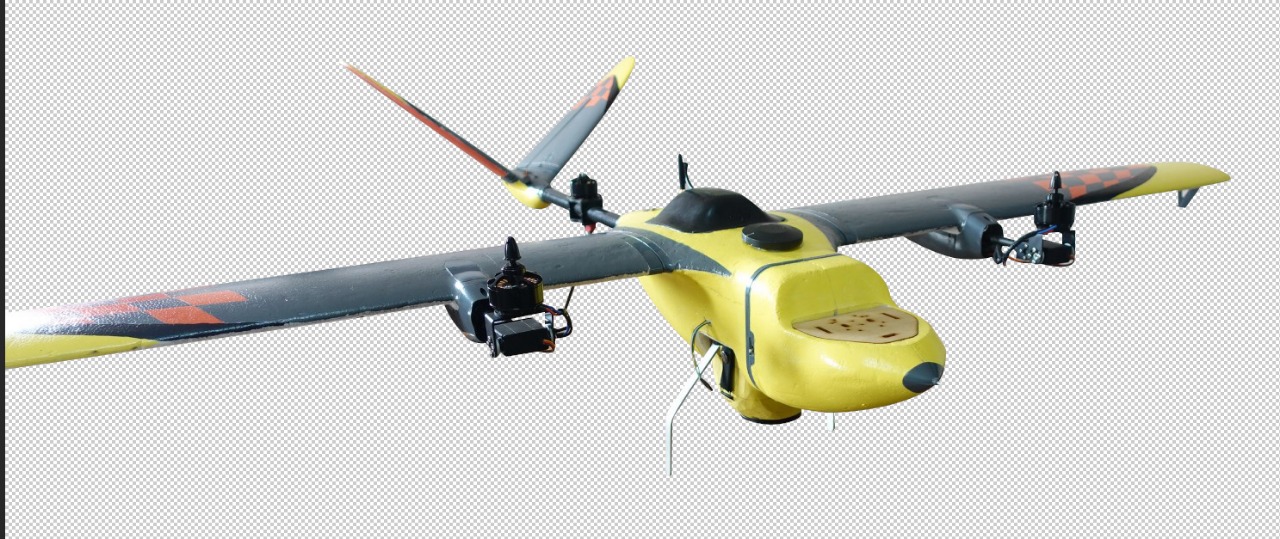
Alat Survey udara
Mungkin diantara alat survei yang mampu diotomasi, alat survey udaralah yang paling terkenal. Kita kenal sebagai drone atau UAV atau pesawat nirawak. Otomasi ini tidak hanya pada wahana pembawa alat survei, tetapi pada alat surveinya sendiri juga dilakukan otomasi.
Dadali VTOL
Alat survey udara yang utama adalah kamera dan penunjuk posisi (GNSS). Kedua alat pengambilan data tersebut sudah dapat diotomasi dalam pengambilan data. Pada kamera dapat disetting berdasarkan jarak serta berdasarkan waktu. Sedang pada GNSS, ada yang dinamakan RTK (Real Time Kinematik), yang berarti GNSS akan mencatat secara otomatis posisi alat survei pada setiap saat.
Alat survey perairan
Alat survei otomasi pada perairan ada dua jenis, yaitu under water dan permukaan (water surface). Yang sering digunakan dalam survei offshore biasanya adalah ROV (Remotely Operated Vehicle). ROV ini bekerja secara otomasi di bawah permukaan laut untuk melakukan survei maupun pengambilan video laut.
ROV H300-MK2
Alat yang bekerja pada permukaan (water surface) biasanya disebut USV (Unmanned Survey Vessel) atau ASV (Autonomous Survey Vessel). Artinya kendaraan air nirawak. Penggunaan ASV ini hampir sama dengan UAV, hanya saja media surveinya adalah perairan. Peralatan yang dibawa pun mengalami otomasi, baik alat survei bathimetri maupun positioning.
AutoBoat ASV
Keunggulan Alat Survey Otomasi
Beberapa keunggulan alat survei otomasi diantaranya:
Kecepatan
Kecepatan pengambilan data merupakan hal yang krusial dalam proyek pengukuran. Dengan kecepatan yang lebih, maka penghematan anggaran akan tercapai.
Keakuratan dan presisi
Terhindarnya human error dapat dilakukan karena sangat minimnya kontak antara manusia dengan alat. Human error ini kadang agak susah diprediksi.
Safety
Minimnya keterlibatan manusia, maka akan meningkatkan safety/keamanan dalam pengambilan data. Resiko kecelakaan kerja akan dapat dikurangi.
Mengapa menggunakan laser scan, terutama Terrestrial Laser scan? Beberapa hal bisa menjawab pertanyaan tersebut.
Fast!
Acquisition speed +/- 1 Mio points per second! Kecepatan pengambilan data pointcloud membuat laser scan merupakan alat yang dapat diandalkan dalam kecepatan. Semakin banyak data yang dikumpulkan dalam satuan waktu tertentu, akan membuat waktu survey akan semakin efesien, dan pada akhirnya akan membuat cost effectiveness.
Accurate
Akurasi merupakan salah satu kelebihan laser scan. Akurasi yang dimaksud disini adalah jarak di benda tersebut. Laser scan mampu memberikan keakurasian sampai dengan +/- 2mm pada jarak 10 meter. Jadi jika sebuah meja panjangnya 5 meter, maka jika diukur dengan laser scan pada jarak 10 meter, maka Panjang meja yang didapat 4.88 m – 5.02 m. Sebuah akurasi yang sangat tinggi pada jarak tersebut
Non Contact
Dengan kelebihann non contact ini maka pada area berbahaya, maka survey masih dapat dilakukan. Hal ini karena TLS tidak perlu kontak dengan benda /equipment yang berbahaya.
Interactive 3D pointcloud
Hasil TLS yang telah dilengkapi dengan kamera 360, sudah dapat disajikan sebagai 3D view. JIka diinginkan untuk lebih interaktif, dapat dilakukan pemodelan 3 dimensi dengan lebih detil. Pemodelan ini akan membuat hasil laser scan dapat digunakan berbagai disiplin.
Portability
TLS saat ini sudah sangat banyak merk dipasaran dan semakin ringan. Hal ini sangat memudahkan dalam mobilisasi maupun demobilisasi peralatan. Untuk Faro, misalnya, berat scanner hanya 4,2 kg. Dengan berat tersebut, mobilitas akan sangat terbantu.
Reliable
Laser scan dapat dibuat 3D model untuk menyajikan obyek seperti sebenarnya. It can provide high quality 3D model of object as is.