Resolusi Spasial dan Ground Sampling Distance (GSD) dalam Survey Foto Udara
Dalam Foto udara sering dibicarakan masalah resolusi spasial dan Ground Sampling Distance (GSD). Lalu apakah hubungan antara resolusi spasial dan GSD tersebut? Kami coba berbagi tentang hal ini.
Resolusi spasial
Sebuat image/citra/gambar biasanya mempunyai tingkat resolusi spasial yang berbeda-beda. Secara mudahnya, resolusi spasial adalah ukuran obyek terkecil yang masih bisa dibedakan, dikenali dan disajikan dari suatu citra/foto. Atau dalam pengertian secara teknis adalah: Spatial resolution is a measure of the smallest object that can be resolved by the sensor, or the ground area imaged for the instantaneous field of view (IFOV) of the sensor, or the linear dimension on the ground represented by each pixel
Jadi resolusi ini tergantung sensor dari alat untuk pengambilan data citra/image. Semakin bagus sensor akan semakin menghasilkan resolusi spasial yang lebih baik. Semakin kecil obyek yang dapat direkam, semakin bagus resolusi spasialnya.
Perbedaan resolusi spasial bisa dilihat dari gambar-gambar di bawah ini.

Gambar 1. Gambaran Resolusi Spasial pada Google Earth
Pada Google Earth, resolusi spasial yang didapatkah kurang detil. Obyek-obyek terlihat blur dan tidak begitu jelas. Tetapi bukan berarti dengan resolusi spasial tersebut, sebuah image/citra tidak dapat digunakan. Hanya saja penggunaan biasanya untuk peta skala kecil.
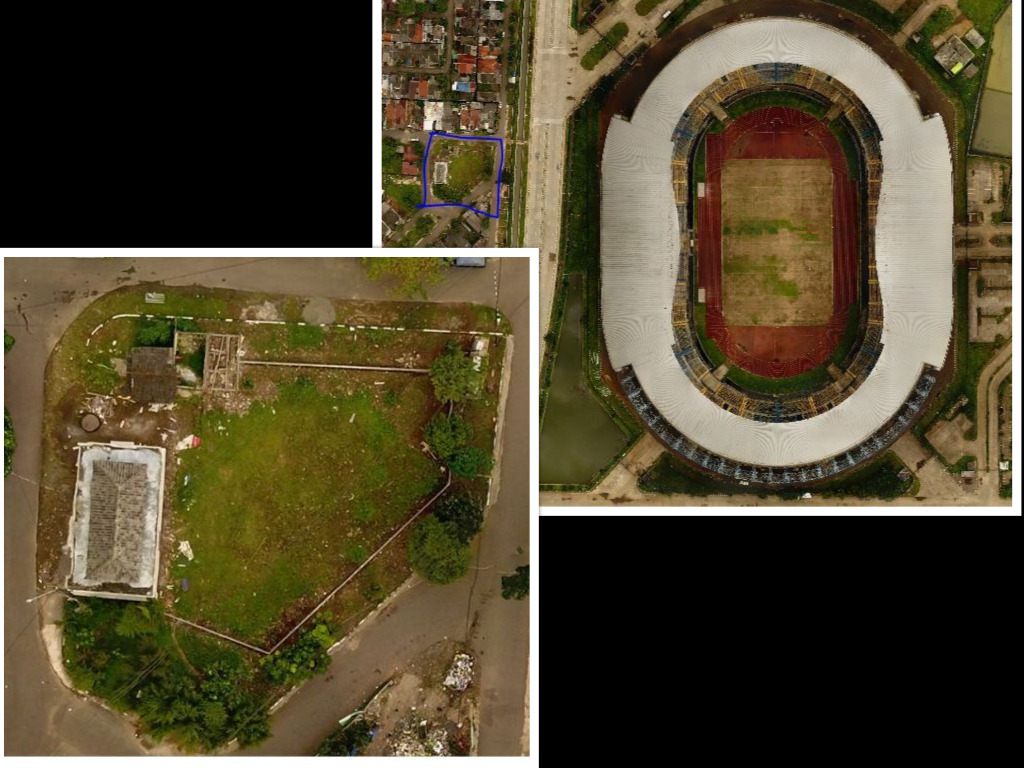
Gambar 2. Gambaran Resolusi Spasial pada foto udara dengan pesawat Nirawak
Pada gambar 2, terlihat obyek-obyek terlihat lebih detil. ini menunjukan resolusi spasial yang lebih baik dibanding dengan gambar pertama. Penggunaan resolusi spasial yang baik biasanya untuk peta-peta dengan skala besar.
Ground Sampling Distance (GSD)
Lalu apa itu Ground Sampling Distance (GSD)? The Ground Sampling Distance (GSD) is the distance between two consecutive pixel centers measured on the ground. Jadi GSD merupakan besaran jarak antar titik tengah pixel yang berdekatan, diukur pada permukaan tanah.
Jarak GSD ini , dalam foto udara khususnya dengan pesawat nirawak, biasanya ditentukan dahulu sebelum terbang dengan software khusus, misalnya mission planner. Dengan menghitung ketinggian yang diharapkan dan sensor kamera yang digunakan, maka GSD dapat ditentukan dengan mudah.
Rumus umum GSD

Dengan rumusan tersebut nilai GSD dapat diatur sesuai dengan kebutuhan, jika akan dilakukan survei foto udara dengan pesawat nirawak.
Hubungan antara resolusi spasial dengan nilai GSD dengan demikian sudah jelas. Semakin besar nilai GSD maka akan semakin mengecil resolusi spasial yang didapat, sehingga obyek yang dikenali secara detil akan semakin berkurang. Demikian juga sebaliknya.