UAV (Autonomous Aerial Vehicle) dadali serta ASV (Autonomous Survey Vessel) Barelang yang dibuat oleh team PT Zona Spasial menggunakan fitur autonomous, yang berarti kedua wahana tersebut dapat beroperasi secara mandiri berdasarkan perintah yang telah diunggah pada autopilotnya. Dua macam wahana (udara dan air) dapat menggunakan satu jenis autopilot, yaitu pixhawk.
Keunggulan sistem Pixhawk seperti multithreading yang terintegrasi, sebuah area pemrograman seperti Unix/Linux, fungsi baru autopilot seperti Lua scripting pada misi dan jalur terbang, dan sebuah layer driver PX4 custom yang memastikan ketepatan waktu sepanjang keseluruhan proses. Kemampuan terbaru ini menegaskan bahwa tidak ada batasan untuk wahana (UAV/ASV) mandiri. Pixhawk juga memudahkan operator APM dan PX4 untuk transisi ke sistemnya, dan pada pengguna baru untuk bergabung dalam dunia wahana otonom yang menakjubkan!
Komponen Pixhawk 3DR PX4
Berikut ini adalah fitur
yang ditawarkan oleh 3DR Pixhawk:
32 bit ARM Cortex® terbaru Prosesor M4 menjalankan NuttX RTOS
Output 14 PWM/servo (8 dengan failsafe dan override manual, 6 bantuan, kompatibel dengan kekuatan yang tinggi)
Pilihan konektivitas yang banyak untuk peripherals tambahan (UART, I2C, CAN)
Sistem backup terintegrasi untuk recover selama penerbangan dan override manual dengan prosesor berdedikasi dan suplai daya yang berdiri sendiri
Sistem backup mengintegrasikan gabungan, menyediakan autopilot yang konsisten dan gabungan mode override manual
Input suplai tenaga yang berlebihan dan failover otomatis.
Tombol safety eksternal untuk aktivasi motor yang mudah
Indikator LED multi-warna
Indikator audio piezo dengan multi-nada dan kekuatan yang tinggi
Kartu Micro SD untuk penyimpanan yang lama dan rate tinggi.
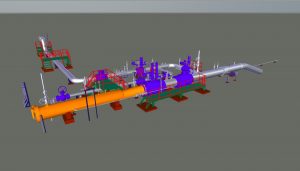
Asset management adalah suatu proses sistematis yang bertujuan untuk mempertahankan, membaharukan, dan mengoperasikan aset secara hemat melalui akuisisi, penciptaan, operasi, pemeliharaan, rehabilitasi, dan penghapusan aset sehingga tujuan dapat tercapai secara efektif dan efisien.
Dengan bantuan teknologi laser scan dan 3D Modeling, manajemen aset dapat dilakukan dengan lebih baik. Kemampuan laser scan dalam mengcapture obyek secara teliti serta 3D model yang dilakukan secara detil akan membantu dalam proses manajemen aset. Manajemen aset untuk obyek-obyek vital akan teroganisir dan sangat membantu dalam pengambilan keputusan.
Laser scan dengan ketelitian sampai dengan 2 mm dan 3D model dengan ketelitian sampai dengan 5 mm akan menggambarkan obyek-obyek vital untuk kepentingan operasi dan pemeliharaan. Secara berkala, updating terhadap obyek-obyek dalam lingkup manajemen aset perlu diperbarui, sehingga memudahkan dalam daily operation & maintenance.
Pertanian Modern saat ini telah mengadopsi banyak teknologi yang bisa membantu dalam hal efektivitas dan efesiensi. Mekanisasi pertanian yang telah dimulai sejak lama. Pembibitan dengan bantuan teknologi dapat dilakukan pemilihan bibit yang meningkatkan hasil panen dan mempercepat waktu panen.
Teknologi pesawat nir awak (Drone/UAV) saat ini mulai dipakai sebagai pendamping teknologi-teknologi yang sudah ada sebelumnya. Pemanfaatan drone bagi pertanian ada beberapa hal antara lain:
Pemetaan lahan Pemetaan lahan ini dilakukan oleh pemerintah maupun petani sendiri. Bagi pemerintah, pemetaan lahan pertanian dapat digunakan sebagai data prakiraan produksi pertanian. Data ini bisa dibagi-bagi menjadi data per jenis tanaman dan per wilayah. Prakiraan panen juga bisa dilakukan dengan menilik pada hasil pemotretan dengan pesawat nir awak. Sedangkan dari pihak petani bisa dilakukan pemotretan secara mandiri maupun berkelompok untuk melihat kesuburan maupun penyakit tanaman serta perkiraan waktu panen. Perkiraan penyakit maupun kesuburan tanaman serta masa panen dapat dilakukan dengan pengolahan rona pada area pertanian.
Proses pemupukan dan penyemprotan pestisida Proses pemupukan (dengan pupuk cair) dan pemberian pestisida bagi tanaman merupakan hal yang selalu dilakukan untuk daya dukung tanaman supaya produksi meningkat. Pemupukan dengan menggunakan pesawat nir awak/UAV/Drone dapat membantu mempersingkat waktu serta efektif pada area tanam.
Sedimen yang dibawa oleh sungai-sungai yang mengalir ke sebuah bendungan/waduk semakin lama akan membuat pengendapan dan mendangkalkan bendungan/waduk tersebut. Monitoring terhadap hal ini bisa dilakukan dengan berkala. Dangkalnya suatu bendungan/waduk tentu saja berpengaruh terhadap kapasitas/daya tampung air yang dibutuhkan.
Pengukuran berkala bisa dilakukan dengan memanfaatkan peralatan survey hidrografi. Pengukuran kedalaman dengan Single Beam Echosounder (SBES) sudah mencukupi untuk keperluan ini.
Peralatan
yang dibutuhkan untuk mengukur dasar waduk antara lain:
Autonomous Survey Vessel (ASV) atau kapal tanpa awak/nirawak untuk wahana alat survey
Global Positioning System (GPS/GNSS), untuk melakukan pengukuran posisi kapal dan alat survey kedalaman
Single Beam Echosounder (SBES), alat yang memancarkan sonar suara yang digunakan untuk mengukur kedalaman
Autopilot, digunakan sebagai pemandu ASV dalam melakukan survey
Hasil akhir yang didapatkan adalah posisi horizontal (X dan Y) serta posisi kedalaman (Z). Berdasarkan hasil tersebut dapat digambarkan kontur kedalaman dasar waduk/bendungan.
Dalam
industri kadang dibutuhkan pembuatan ulang suatu barang yang
kebutuhannya bersifat unik dan mempunyai ukuran tersendiri. Pembuatan
kembali (refabrikasi) terhadap suatu barang membutuhkan ukuran detil
barang tersebut. Jika tersedia gambar rencana maka hal tersebut dapat
dilakukan segera, tetapi jika tidak tersedia maka perlu dilakukan
poembuatan as built.
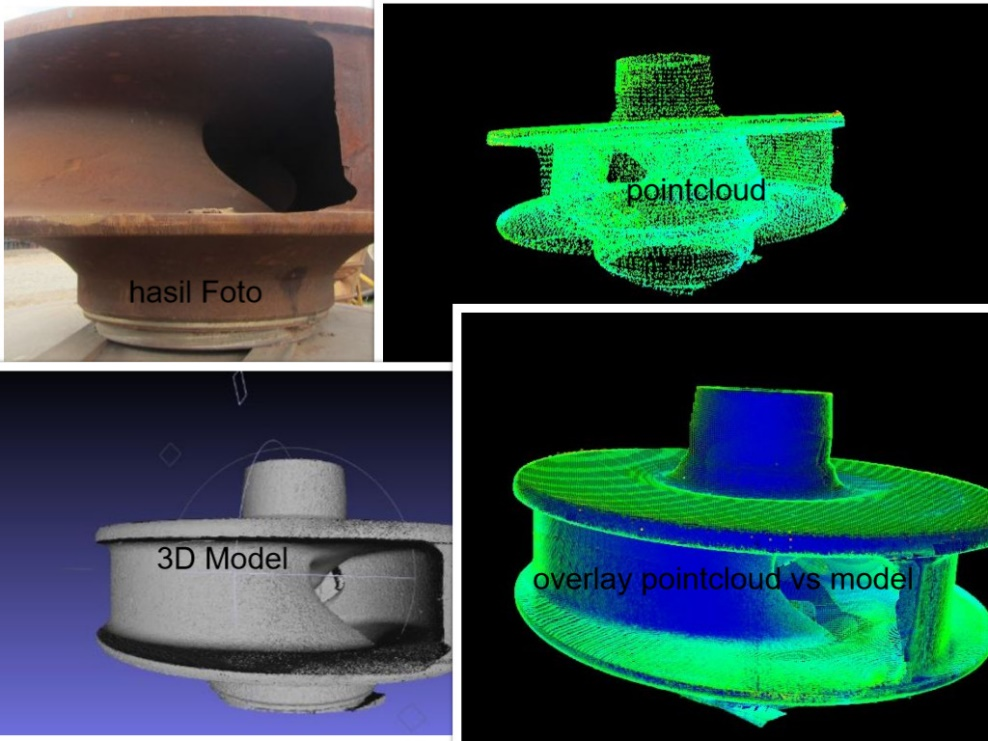
As built Drawing yang sesuai dengan ukuran sebenarnya membutuhkan pengukuran yang detil. Laser scan yang dilanjutkan dengan pembuatan 3D Model akan membantu dalam pembuatan as built drawing. Selanjutnya as built tersebut dapat digunakan sebagai bahan melakukan refabrikasi.
Tahapan
dalam melakukan pengambilan data laser scan dan pengolahan 3D model:
Pengambilan data pointcloud dengan laser scan
Registrasi pointcloud dengan titik control (Sphere dan target)
Pembuatan model 3 dimensi (3D Model)
Pembuatan slicing gambar 2D untuk keperluan fabrikasi
Tahapan-tahapan
dalam melakukan laser scanning dan pembuatan 3D model ini dilakukan
dengan ketelitian yang maksimal. Ketelitian yang bisa didapat dari
Laser Scan maksimal 2mm, sedangkan ketelitian modeling 3D sekitar 2-4
mm.
Setelah
tahapan-tahapan dilakukan dan ketelitian yang diperoleh sesuai dengan
yang diharapkan maka, proses re-fabrikasi bisa dilaksanakan.
3D Laser scan atau Pemindaian laser 3 Dimensi menggunakan
teknologi berbasis LIDAR untuk secara akurat dan efisien menangkap data 3
dimensi dalam berbagai pengaturan, terlepas dari ukuran dan fitur permukaan. 3D
Laser Scan dapat digunakan tanpa menyentuh secara fisik objek apa yang sedang
diukur. pemindaian laser menciptakan catatan digital yang jelas dan akurat dari
kondisi yang ada (as-built). Pemindaian menghasilkan jutaan titik pengukuran
yang disebut “koordinat.” Bersama-sama titik membuat data mentah
dalam bentuk “point cloud.” Setiap koordinat dalam point cloud berisi
nilai x, y, dan z, yang juga dikenal sebagai (Northing (y), Easting (x), dan
Elevation (z)). Dari detail titik-titik ini, kita bisa mendapatkan pengukuran
yang tepat dari satu titik point cloud ke titik lainnya.
Apa fungsi 3D Laser Scan?
terestrial laser scan
3D Laser Scan dapat digunakan untuk menangkap informasi dan
data dari objek untuk digunakan sebagai analisis teknis dan pemodelan ulang.
Penggunaan umum laser scan ini adalah:
As-built survey, memotret realitas atau survei
kondisi yang ada
Verifikasi konstruksi, sortasi, dan simulasi
Design engineering untuk peningkatan atau
perluasan fasilitas
Prefabrikasi
Deteksi benturan / benjolan
Dokumentasi arsitektur atau pelestarian sejarah
Menghitung volume, analisis deformasi, dan biaya
overhead
Desain dan konstruksi virtual
Pemindaian laser untuk koordinasi fasilitas
Mengumpulkan data geospasial
Keunggulan dari laser scan
proses akusisi data laser scan
Cepat. Laser scan dapat menangkap hingga jutaan titik data 3D per detik, memberikan detail yang sangat akurat dan kaya dari setiap aspek proyek Anda.
Akurat. Pengukuran yang diperoleh dengan pita pengukur atau handheld GPS dapat mengalami kesalahan. Pemindaian laser adalah bentuk pengukuran paling akurat yang ada, memberikan akurasi skala milimeter atau kurang.
Menjawab kebutuhan survey. Berapa kali Anda meninggalkan lokasi kerja dengan menyisakan beberapa pengukuran lagi? Pemindaian BIM 3D akan menangkap data tambahan, sehingga tidak perlu kembali ke proyek untuk mengambil data tambahan.
Keselamatan. Pemindaian 3D dapat memperoleh pengukuran di lokasi yang sulit dijangkau atau berbahaya sambil menjaga pekerja agar tidak berada di jalur yang berbahaya.
Bagaimana proses operasional laser scan? Secara umum langkah kerja yang dilakukan
adalah sebagai berikut :
Pre-Survey
Sebelum survey, tim akan
melakukan pekerjaan sebagai berikut :
Memastikan semua alat laser Scanner berfungsi normal dan
lengkap dengan segala asesorisnya.
Memastikan semua battery dalam kondisi penuh siap
digunakan.
Memastikan PC dan semua software yang dibutuhkan siap
digunakan.
Membuat perencanaan survey.
Sebagai tambahan tim survey juga
akan melakukan observasi lingkungan sebagai berikut :
Memastikan akses kerja
Memeriksa area ber-vibrasi tinggi
Memeriksa tingkat kebisingan
Memeriksa hambatan
pada suhu
tinggi
Area potensi berbahaya
Kondisi pencahayaan
Hal lain yang akan mengganggu aktivitas survey
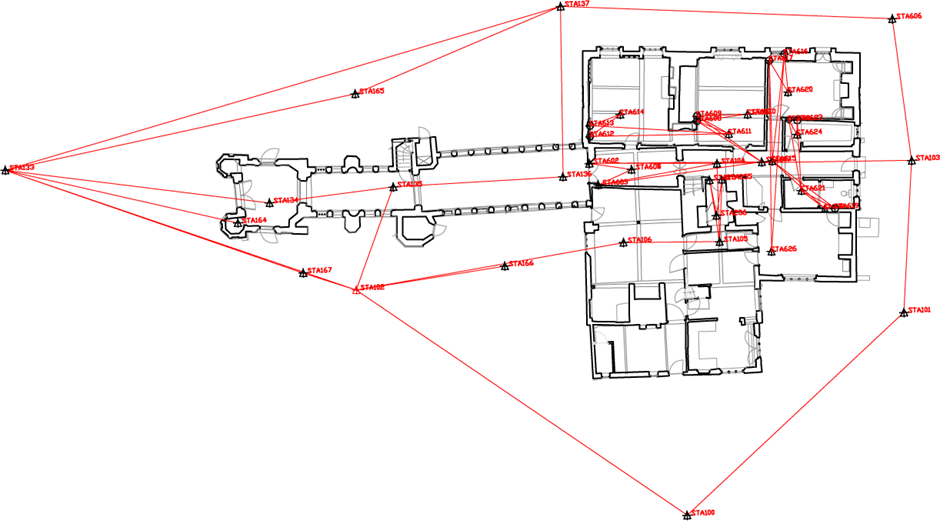
Survey
Control
Tim survey akan
menetapkan titik kontrol di sekitar area pekerjaan dengan menggunakan metoda
traverse. Pengukuran akan menggunakan alat Total Station. Titik kontrol ini
akan terikat ke titik kontrol utama (BM) yang sudah ada di lokasi atau yang di
tentukan client. Titik-titik kontrol tersebut akan ditandai dengan Checkerboard
yang selanjutnya akan berfungsi sebagai target pengikatan antar posisi Laser
Scan.
skema transverse method
Akusisi Data
Secara umum proses survey
Laser Scanning akan memakan waktu sekitar 10 menit untuk satu posisi scan, dengan resolusi sekitar 6 mm pada jarak 10m. Sebagai
pengikatan antan scan akan disebarkan target Sphere dan Checkerboard di sekitar
area pekerjaan.
3D Laser Scanner akan mengambil data pointcloud dan photo 360° horizontal dan 270° vertikal. Alat laser Scanner hanya bisa merekam objek yang terlihat, sementara untuk mendapatkan data
dari objek yang terhalang, alat harus berpindah tempat. Semua Checkerboard harus teregistrasi dengan
sistem koordinat. Minimal ada 4 target yang ter-scan sebagai target ikatan antar
scan.
target dan sphere untuk akusisi data
Data Processing
Processing akan dimulai dengan penggabungan semua posisi scan dengan target Sphere dan Checkerboard sebagai ikatan antar scan (registrasi). Setiap scan akan terikat dengan scan lainnya minimal pada 4 target dan semua target terikat pada titik kontrol. Aktivitas ini akan menggunakan software Faro Scene. Setelah semua scan terigistrasi dengan baik, selanjutnya akan di export ke software Cyclone untuk proses QC dan pembuatan model 3D.
Ketika drone/ UAV komersial pertama kali diperkenalkan,
industri survey pemetaan (geospasial) segera mengadopsinya. Drone dilengkapi
dengan berbagai jenis sensor dan kamera, drone diubah menjadi perangkat
pengumpul data terbang. Jelas bahwa drone dapat mengoptimalkan alur kerja,
meningkatkan keselamatan, mengoptimalkan hasil proyek dan merealisasikan
penghematan biaya yang cukup besar. Contoh berikut menunjukkan bagaimana
perusahaan survey menggunakan drone dalam berbagai proyek yang menggunakan data
geospasial.
Survey dan Pemetaan
Tim Zona Spasial memonitor pesawat UAV
UAV dapat meringankan pekerjaan proyek survey pemetaan
terestrial secara signifikan, misalnya di daerah berbahaya dimana tanah longsor
dan gempa bumi biasa terjadi. Contohnya adalah proyek pemetaan di Papua Nugini,
yang dilakukan oleh Survey & Design, sebuah perusahaan survei di Queensland
Utara, Australia. Dengan menggunakan UAV untuk survey situs topografi, tim
dapat menghemat waktu dan meningkatkan keselamatan. Para surveyor tidak perlu
memasuki area berisiko dan menempatkan peralatan survey di sana. Menggunakan
sensor canggih, dengan akurasi data sama baiknya, drone dapat menggantikan
metode survey tradisional.
Drone tentu saja telah mengubah industri survey pemetaan, penghematan biaya, efisiensi dan keuntungan keamanan. Perusahaan survey ingin meningkatkan efektifitas survey dengan drone, artinya berusaha melakukan survey dengan area lebih banyak namun dengan waktu yang lebih sedikit. Drone telah terbukti menjadi cara terbaik untuk melakukan survey lahan, namun perusahaan surveyor terlebih dahulu harus berinvestasi sebelum mereka dapat melihat manfaat finansial.
Misalnya, investasi dalam pelatihan untuk dapat mengoperasikan UAV, dan sistem UAV yang lengkap (bukan hanya drone, tetapi seluruh rangkaian perangkat keras dan perangkat lunak) yang menghasilkan data foto udara yang optimal. Riset dan pengembangan juga telah dilakukan oleh tim Zona Spasial. Tim engineer kami telah melakukan serangkaian riset untuk meningkatkan kapabilitas di bidang survey foto udara, hingga lahirlah pesawat rakitan kami, Dadali UAV.
Selama bertahun-tahun, perusahaan survey pemetaan harus
mengandalkan fotografi udara menggunakan airborne ketika memetakan tambang
terbuka. Tetapi fotografi udara terbukti mahal, karena proyek pemetaan udara
biasanya mencakup wilayah yang luas agar menguntungkan. Drone terbukti menjadi
alternatif yang bagus untuk area pemetaan skala kecil seperti tambang terbuka.
Selain itu, mereka dapat memetakan area yang tidak aman dan tidak dapat diakses
oleh manusia
Hal yang sama dapat dilakukan untuk survey tanah di area
tambang, seringkali penuh dengan resiko. Dengan menggunakan UAV yang dilengkapi
dengan kamera udara, anda dapat menghindari resiko itu. Saat ini banyak
perusahaan menawarkan hexacopter yang dapat terbang mandiri untuk menghasilkan produk
data geospasial seperti orthophotos (gambar udara yang dikoreksi secara
geometris), model 3D point cloud (set titik data di ruang angkasa, yang berisi
koordinat x, y dan z) ). Terlepas dari tujuan pemetaan, pekerjaan yang sedang
berlangsung di tambang terbuka dapat dipantau menggunakan UAV, misalnya stock
pile, muck pile, pemantauan dan
analisis aset, serta inspeksi pabrik, dan peralatan.
Pertanian
Drone untuk pertanian
Pertanian digital adalah pangsa pasar baru dimana teknologi
drone semakin banyak diterapkan. Perusahaan software pemetaan mengembangkan
fitur khusus drone dalam industi pertanian. Citra drone dan teknik fotogrametri
dapat membantu petani mengelola dan memantau tanaman mereka. Misalnya, peta foto
udara yang beresolusi tinggi dapat membantu petani untuk mencari tahu masalah
tanaman, sedangkan peta indeks vegetasi membantu mereka memahami kondisi
tanaman. Kita juga dapat menghitung jumlah tanaman dengan fitur tree counting.
Model permukaan digital terperinci membantu petani untuk merencanakan irigasi,
struktur lapangan untuk meminimalkan erosi tanah, dan dapat digunakan untuk
memvalidasi klaim asuransi. Ini baru permulaan, aplikasi pertanian yang baru akan
terus bermunculan dan dikembangkan. Salahsatu yang mungkin diterapkan adalah,
memperkirakan pertumbuhan tanaman (forecasting) yang akan membantu memahami
bagaimana tanaman berubah seiring waktu, sebagai hasil dari berbagai teknik
pertanian.
Energi
Peta Area Mikrohidro
Inspeksi kabel listrik adalah kasus penggunaan survey
pemetaan yang penting untuk drone. Industri energi telah berpaling dari
penggunaan helikopter dan operasi darat, dengan memanfaatkan otomatisasi survey
grid, untuk meningkatkan keselamatan, manajemen data, dan mengurangi dampak
lingkungan. Delair-Tech, penyedia solusi drone end to end yang aktif di banyak
industri yang berbeda, mengklaim bahwa drone menghemat 30 hingga 40 persen
biaya proyek daripada menggunakan helikopter untuk pekerjaan inspeksi saluran
listrik.
Konstruksi
Foto udara rel kereta
Area konstruksi dapat dikelola dan ditingkatkan dengan
menggunakan drone. Keselamatan selalu menjadi masalah besar di area ini. Kabar
baiknya adalah, survey menggunakan drone untuk melakukan pengukuran atau
kegiatan lain dapat membantu menghindari korban. Kedua, karena tempat kerja
cenderung berubah dengan cepat dari waktu ke waktu, drone dapat digunakan
sebagai perangkat pemantauan dengan mengumpulkan data di sekitarnya. Model 3D
yang didasarkan pada pengumpulan data berbasis drone, dapat secara akurat
menampilkan pembaruan harian yang pada gilirannya dapat dibagikan di antara
semua pemangku kepentingan, memberikan satu sumber data faktual. Hal ini pada saatnya
membantu mengurangi risiko survey dan mengidentifikasi masalah sebelum timbul,
serta menghindari kesalahan yang berbiaya mahal.
Distribusi dan Monetisasi Peta Drone
Foto udara perkotaan
Artikel ini membahas penggunaan drone dalam banyak industri, yang menunjukkan bagaimana proyek survey dan pemetaan dapat mengambil manfaat dari penggunaan drone. Sayangnya, proyek drone sebagian besar dilakukan sekali, dan data hanya digunakan oleh beberapa pemangku kepentingan. Apa yang akan terjadi jika kita memiliki peta di banyak lokasi survey namun tidak dimanfaatkan lebih lanjut? Ini merupakan sebuah peluang untuk memanfaatkan kembali peta yang kita dapatkan dan menjualnya kepada pihak lain yang membutuhkan. Jika suatu saat ada permintaan proyek dan ternyata kita sudah pernah memetakan lokasi tersebut? maka dengan mudah kita menjual peta hasil proyek sebelumnya untuk berbagai kepentingan.
untuk proyek survey pemetaan bagi perusahaan Anda, segera hubungi kami di info@zonaspasial.com atau WA 085794084844
Industri kini telah masuk dalam era otomatisasi. Semua industri melakukan revolusi dalam hal business improvement process. Dalam hal survey dan pemetaan, penggunaan UAV / drone diadopsi untuk melakukan inspeksi dan monitoring aset perusahaan. Penggunaan drone tersebut merupakan salahsatu proses improvement karena drone dapat menghasilkan data foto udara yang dapat di cek secara berkala.
Industri drone komersial berada di titik puncak era baru otomatisasi. Penerbangan drone yang dilakukan secara otomatis bukanlah hal baru, namun dalam hal mengukur dan menganalisis data foto udara masih merupakan proses manual. Ketika industri drone semakin matang, maka otomatisasi akan diperlukan untuk memastikan hasil foto udara UAV yang konsisten dan akurat. Seperti halnya yang dilakukan PT Zona Spasial. dalam survey pemetaan, kami melakukan otomatisasi jalur terbang melalui Mission Planner. Namun untuk olahdata, masih diperlukan usaha manual untuk melakukannya.
Tim Pilot UAV Zona Spasial memantau pesawat UAV dalam proyek pemetaan
Apa yang Diperlukan untuk mengukur otomatisasi operasi Drone
agar dapat bisa di-scalable?
Alur Kerja Berulang (Repeatable Workflows)
Bagi perusahaan mana pun yang mengembangkan software pemetaan drone, mereka harus mampu menghasilkan alur kerja yang dapat diulang yang mudah bagi para pekerja untuk berintegrasi ke dalam operasi sehari-hari mereka. Jika alur kerja tidak dapat direplikasi dengan mudah, akan lebih sulit untuk digunakan surveyor dan itu pasti tidak bisa skala.
Perangkat Keras dan Perangkat Lunak Handal
Setiap hasil olah data foto udara yang terukur harus dapat diandalkan. Perusahaan membutuhkan solusi yang dapat dipercaya setiap kali bekerja dan menyampaikan wawasan yang mereka andalkan untuk membuat keputusan bisnis yang lebih cerdas. Itulah mengapa keandalan teknologi diperlukan untuk memproses hasil foto udara UAV itu.
Hasil yang Konsisten
Konsistensi diperlukan jika perusahaan survey ingin menerapkan solusi drone dalam skala besar. Sayangnya, pengukuran dan analisis manual tidak hanya memakan waktu tetapi juga rentan terhadap kesalahan. Mesin dapat membantu. Itulah sebabnya otomatisasi dalam pengolahan survey pemetaan akan bergantung pada algoritma dan deep learning machine untuk mendorong hasil yang konsisten dan akurat setiap saat.
Machine Learning, Computer Vision, dan Artificial Intelligence di masa depan
Kehadiran Machine Learning dan AI dapat mempermudah masa depan industri Survey
Kunci untuk mengembangan dan skalabilitas (scalability)
adalah otomatisasi. Tapi bagaimana Anda mengotomatiskan analisis data foto udara
UAV? Disinilah machine learning dan kecerdasan buatan dapat berperan. Kita
dapat mengajarkan mesin untuk mendeteksi pola dan objek, membuat pengukuran
yang akurat, dan mengubah kumpulan data besar menjadi laporan yang mudah
dicerna.
Telah banyak pembicaraan tentang teknologi ini di industri
drone komersial, namun baru sebatas rumor. Mengapa demikian? sebagai industri
baru, otomatisasi baru saja dimulai. Untuk memberikan solusi yang dipandu oleh
AI (artificial intelligent) sejati dalam mengotomatisasi alur kerja, diperlukan
banyak data.
Sekarang saatnya mengumpulkan data hasil survey pemetaan tersebut untuk bekerja untuk membangun solusi machine learning terdepan di industri untuk memecahkan tantangan dunia nyata yang dihadapi perusahaan saat mereka menempatkan drone untuk bekerja di lapangan setiap hari.
Dalam survey topografi, dikenal istilah elevasi atau ketinggian suatu objek dari titik tertentu. persamaan elevasi dihubungkan oleh garis imajiner yang kemudian menjadi profil topografi muka bumi. Sebagai seorang surveyor, mengenali elevasi muka bumi adalah keharusan. Kita harus dapat membedakan model elevasi muka bumi atau elevasi berdasarkan tutupan lahannya. Pengetahuan itu dapat berguna untuk menentukan model apa yang cocok digunakan untuk menganalisis data spasial. Oleh karena itu, mari simak penjelasannya.
Sensor dalam kamera menangkap cahaya matahari yang dipantulkan oleh medium tertentu untuk kemudian ditangkap menjadi foto udara. Pantulan cahaya matahari tersebut didapatkan dari medium (tempat) yang berbeda-beda. Ada cahaya yang tembus sampai ke permukaan tanah, batu, pepohonan maupun atap rumah. Semuanya menjadikan kesan ketinggian yang beragam tergantung dengan medium tempat pantulan cahaya. Inilah yang menjadi awal mula perbedaan model antara Digital Surface Model (DSM), Digital Elevation Model (DEM), dan Digital Terrain Model.
Apa itu Digital Surface Model (DSM)?
Digital Surface Model
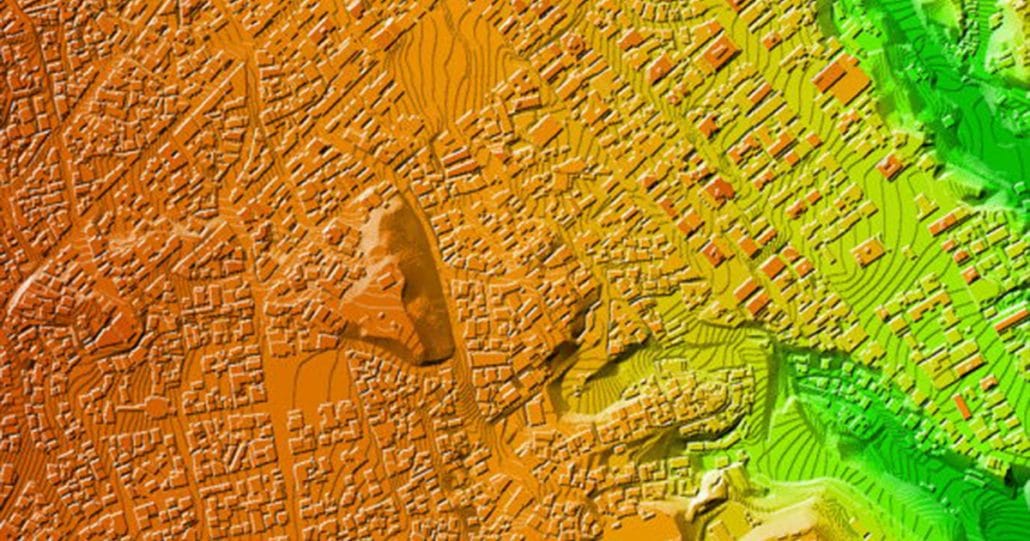
DSM atau disebut pula Model Permukaan Digital adalah model permukaan bumi dengan menggambarkan seluruh objek permukaan bumi yang terlihat. Objek bangunan, vegetasi yang menutupi tanah dan objek tanah yang terbuka termasuk dalam data tersebut. Kenampakan DSM akan menggambarkan bentuk permukaan bumi seperti keadaan nyata yang terlihat dari foto.
DSM berguna dalam pemodelan 3D untuk telekomunikasi, perencanaan kota dan penerbangan. Karena objek tutupan di permukaan bumi dapat dianalisis untuk kebutuhan berikut ini:
Pendekatan Zona Runway: Dalam penerbangan, DSM dapat menentukan penghalang landasan di zona pendaratan pesawat terbang.
Pengelolaan Lingkungan: DSM dapat memberikan gambaran yang jelas mengenai perbedaan tutupan lahan dan kondisinya
Analisis Obstruksi: DSM dapat digunakan untuk menganalisi spotensi dan konektivitas dalam hal perencanaan wilayah.
Apa itu Digital Elevation Model (DEM)?
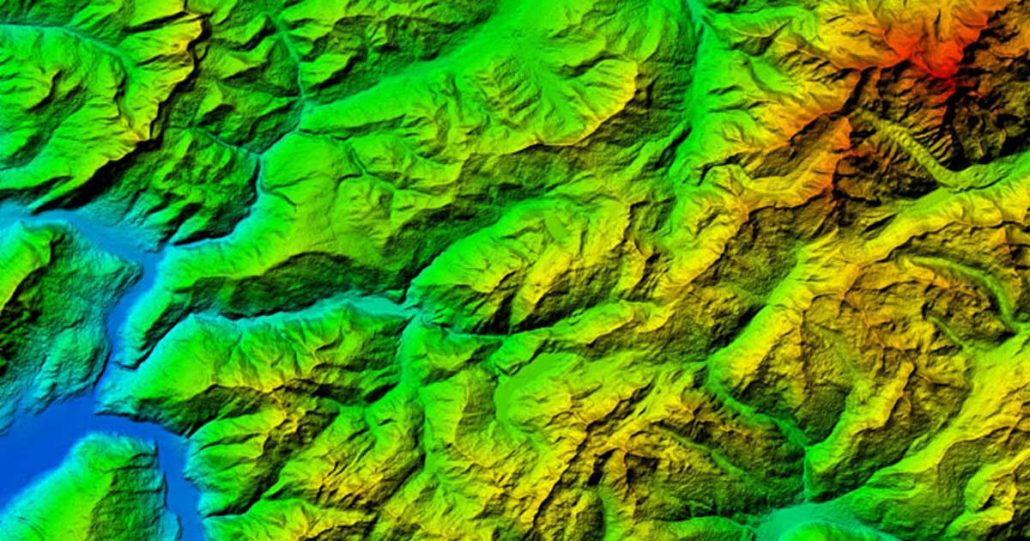
Digital Elevation Model
DEM atau Model Elevasi Digital adalah grid raster yang mereferensikan titik awal dari permukaan bumi. Pemodelan ini memungkinkan Anda untuk mengeliminasi objek di permukaan tanah seperti tanaman dan perumahan, model yang dihasilkan berupa model 3D dengan permukaan yang halus. Bangunan (jaringan listrik, gedung dan menara) dan fitur alam (pohon dan jenis vegetasi lainnya) tidak termasuk dalam DEM. Pemodelan ini berguna untuk:
Hidrografi: Hidrologi menggunakan DEM untuk menggambarkan batas air, menghitung akumulasi aliran dan arah aliran.
Stabilitas Batuan: berguna untuk merencanakan pembangunan jalan raya dan pemukiman, kaitannya dengan daerah rawan longsoran dan daerah lereng yang tinggi dengan vegetasi yang jarang.
Pemetaan Tanah: DEM membantu pemetaan jenis tanah berdasarkan pengamatan terhadapap elevasi, kondisi geologi, faktor pendukung lainnya.
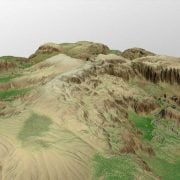
Apa itu Digital Terrain Model (DTM)?
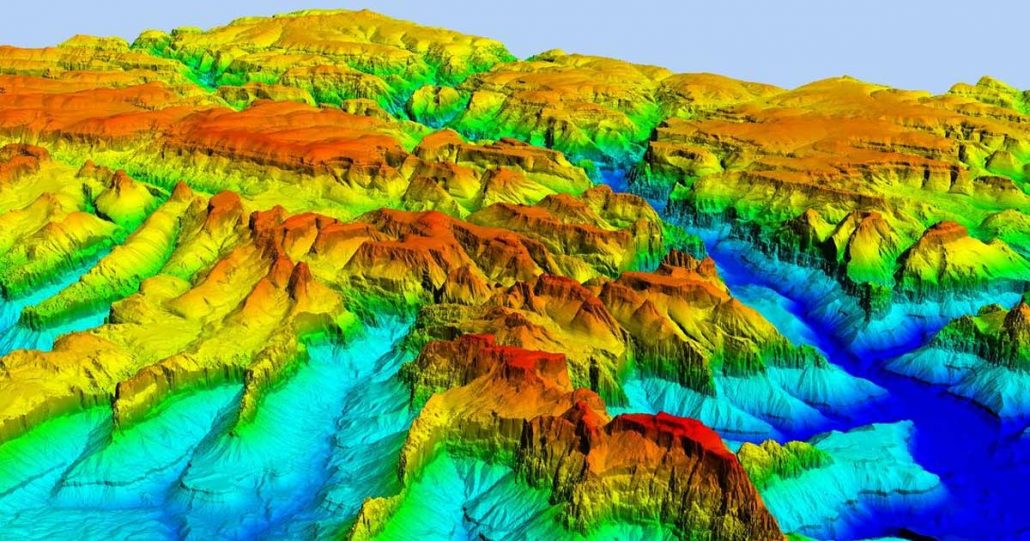
Digital Terrain Model
DTM sebenarnya identik dengan DEM, bahkan disamakan posisinya. Ini berarti bahwa DTM hanyalah permukaan elevasi yang mewakili bumi kosong yang direferensikan ke datum vertikal. DTM biasanya dibuat melalui fotogrametri stereo. Titik-titik DTM secara terpisah secara teratur mengikuti bentuk permukaan bumi. Dari garis-garis ruang dan kontur yang teratur ini, Anda dapat menginterpolasi DTM menjadi DEM. DTM merepresentasikan fitur medan yang lebih baik karena batas-batas 3D dan titik-titik massa 3D yang teratur secara spasial.
Bagaimana cara menangkap Model Elevasi Digital?
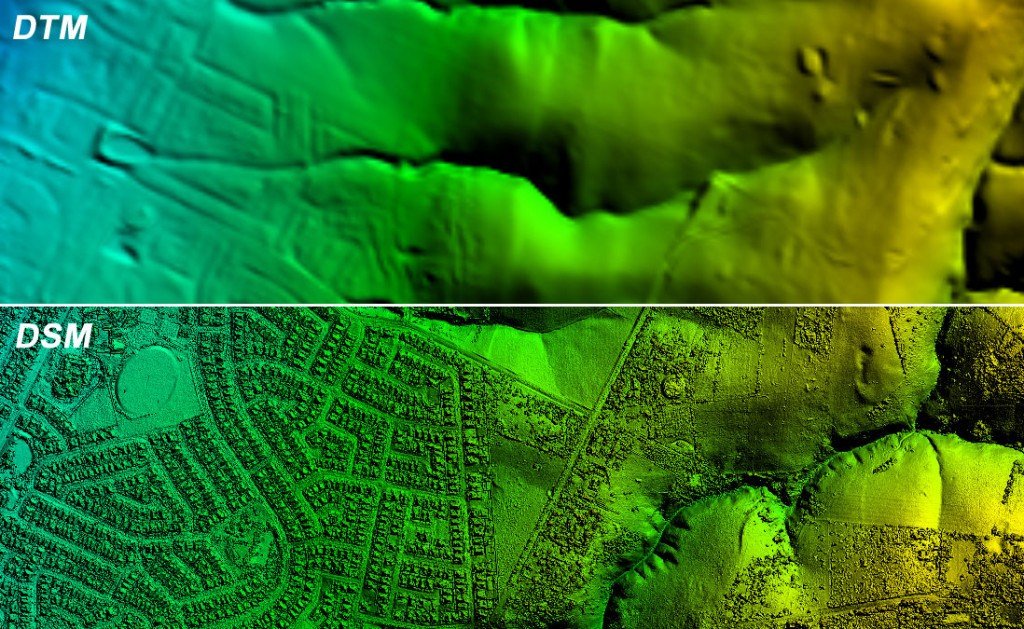
Perbedaan DSM dengan DTM / DEM
Beberapa metode penginderaan jauh untuk mendapatkan permukaan DEM adalah:
Data Citra Satelit: Radar aperture sintetis seperti Shuttle Radar Topography Mission menggunakan dua gambar radar dari antena yang diambil pada saat yang sama untuk membuat DEM.
Photogrammetry: Dalam fotografi udara, fotogrametri menggunakan foto dari setidaknya dua titik pandang yang berbeda. Serupa dengancara mata kita bekerja, ia dapat memperoleh kedalaman dan perspektif karenatitik pandang yang terpisah.
LiDAR: Menggunakan cahaya, pengukuran LiDAR memantulkan cahaya yang memantul ke tanah dan kembali ke sensor untuk mendapatkan elevasi permukaan Bumi.
Ada banyak sekali manfaat dari ketiga produk ini, pembuatan produk turunan DEM disesuaikan dengan tujuan awal seperti untuk analisa volume, jarak cut and fill, rencana pembuatan terowongan, jembatan analisis aliran air,analisis daerah rawan longsor, irigas, erosi, pembuatan jaringan jalan danbanyak lagi bahkan sampai aspek pertahanan yang dipakai dunia militer.
Dengan adanya model 3D dari suatu wilayah maka rencana dapat dibuat dengan matang serta data yang ada dapat digunakan untuk berbagai macam simulasi dan analisis.
Perkembangan software dan dunia digital yang begitu cepat juga membantu mempermudah pembuatan produk ini, jika dulu penggunaan LIDAR menjadi tehnik favorit untuk membuat DSM kini dengan foto udara dan bantuan software DSM juga dapat dibuat dengan akurasi yang tidak kalah dan lebih murah.
Di era industri 4.0, kita akan dihadapkan dengan teknologi otomatisasi dengan menggunakan kecerdasan buatan. Terdapat lima teknologi utama yang menopang pembangunan sistem industri 4.0, yaitu Internet of Things, Artificial Intelligence, Human–Machine Interface, teknologi robotik dan sensor, serta teknologi 3D Printing. Pada tulisan kali ini, akan dibahas mengenai wahana drone yang merupakan wujud dari IoT kaitannya dengan pemanfaatan sehari-hari. Drone ternyata digunakan begitu luas bukan hanya untuk foto dan video udara. Bukan pula untuk kebutuhan survey dan pemetaan. Namun sudah bergeser pada banyak industri lain. Hal ini dikarenakan untuk meminimalisir dampak human error dan efisiensi kerja. Berikut beberapa pemanfaatan drone bagi beberapa industri yang mungkin belum kita ketahui:
Drone Taxi
Drone Taxi
Drone Taxi digunakan untuk transportasi publik layaknya taksi darat. Drone ini dapat membawa 1-2 penumpang tanpa disertai dengan pilot manusia. Konsep ini digagas oleh perusahaan Cina, eHang dan sudah mulai diujicobakan di Dubai pada akhir 2017 lalu. Bahkan startup taksi online, Uber akan mulai menggagas Drone TaxiAir untuk pengembangan bisnis mereka. Setidaknya ada beberapa pabrikan yang sudah melakukan uji coba drone berpenumpang ini.
Drone Waiters
Drone Waiters
Drone pelayan ini disebut “Infinium Serve“. Dibuat dan diproduksi oleh Infinium Robotics Singapura. Grup restoran Timbre Singapura berencana menggunakan drone untuk beroperasi di restoran mereka. Restoran pertama yang menggunakan drone sebagai pelayan adalah Yo Sushi yang berbasis di London. Mereka menggunakan RC Quadcopter yang harus dikontrol secara manual sedangkan Infinium Serve sepenuhnya otomatis. Infinium Serve saat ini dapat membawa muatan hingga 1kg dan mereka berencana untuk meningkatkan muatan hingga 1,5 kg.
Drone Delivery
Drone Delivery
Amazon telah meluncurkan layanan pengiriman menggunakan drone bernama Amazon PrimeAir. Amazon tinggal membutuhkan dukungan regulasi penerbangan di berbagai tempat untuk mewujudkan visi mereka. Sementara Amazon masih mempromosikan di sana-sini, startup Matternet yang berbasis di California telah menjalankan pengiriman drone untuk pasokan medis dan spesimen di negara-negara di seluruh dunia sejak didirikan pada 2011. Tetapi mereka belum berencana untuk melakukan riset lebih lanjut.
Drone Fishing
Drone Fishing
Di Selandia Baru, ada metode memancing yang disebut memancing kontiki. Memancing Kontiki adalah gaya tradisional memancing dari Kepulauan Pasifik. Metode ini menggunakan rakit berlayar, layang-layang, dan alat seperti torpedo modern untuk melempar umpan dari garis pantai ke laut, dimana kita menautkan kait dan umpan. Pada tahun 2014, AeroKontiki muncul. Anda tinggal mengaitkan umpan ke kail kemudian ditarik ke laut jauh menggunakan drone. Dengan menggunakan drone, kita dapat menjangkau tempat-tempat yang biasanya tidak dapat dijangkau untuk mencari ikan.
Drone FireFighter
Drone Firefighter
Drone pemadam kebakaran sudah mulai dimanfaatkan di beberapa negara. Karena profesi ini berhadapan dengan situasi hidup dan mati, maka diperlukan alat otomatis yang dapat menjangkau area terdampak dan segera mengambil tindakan untuk memadamkan api. Drone juga berfungsi sebagai dukungan udara yang dapat membantu memutuskan lokasi penyemprotan air. Petugas pemadam kebakaran Cina menggunakan pesawat tak berawak yang dapat tetap mengudara sepanjang waktu. Mereka menggunakan fasilitas darat yang memasok listrik untuk drone mereka. Sementara di Korea Selatan, para peneliti dari Korea Advanced Institute of Science & Technology (KAIST), telah mengembangkan pesawat tanpa awak yang dapat terbang dan merangkak dinding untuk melawan kebakaran di sebuah gedung tinggi. Mereka bahkan membuat drone tahan api. Drone tersebut dapat menahan panas lebih dari 1000° Celcius dari gas butana dan etanol aerosol api selama lebih dari satu menit. Mereka menamai drone mereka FAROS untuk Sistem Robot Udara Tahan Api.
Drone Racing
Drone Racing
Penggunaan drone yang cukup populer adalah drone racing atau balapan drone. Bahkan terdapat turnamen Drone Racing League yang merupakan kompetisi drone racing dimana 4 drone saling berlomba di setiap balapan. Pilot mengontrol drone menggunakan remote control dan headset First-Person View Virtual Reality (FPV VR) sebagai mata mereka. Perlombaan ini terlihat seru dan mendebarkan karena atraksi manuver pilot di sekitar sirkuit. Penonton dapat menonton seluruh balapan dari kamera FPV yang merupakan cuplikan mata dari sang pilot. Kini anda dapat mengikuti kejuaraan dunia drone racing untuk memuaskan rasa hobby para pecinta aeromodelling.